ARMAX: One Step Prediction IIT Bombay Consider 2' nd order - PowerPoint PPT Presentation
Automation Lab ARMAX: One Step Prediction IIT Bombay Consider 2' nd order ARMAX model with d 1 = y ( k ) a y ( k 1 ) a y ( k 2 ) b u ( k 2 ) b u ( k 3 ) = + + 1 2 1 2 e (
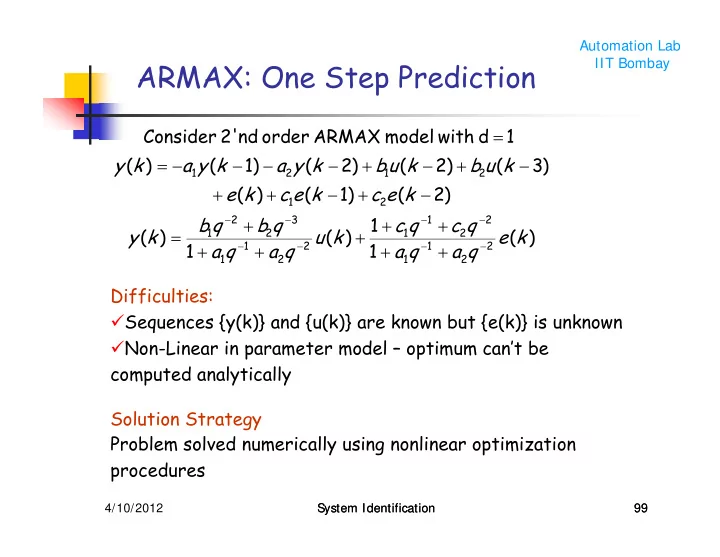
Automation Lab ARMAX: One Step Prediction IIT Bombay Consider 2' nd order ARMAX model with d 1 = y ( k ) a y ( k 1 ) a y ( k 2 ) b u ( k 2 ) b u ( k 3 ) = − − − − + − + − 1 2 1 2 e ( k ) c e ( k 1 ) c e ( k 2 ) + + − + − 1 2 b q 2 b q 3 1 c q 1 c q 2 − − − − + + + y ( k ) u ( k ) e ( k ) = 1 2 + 1 2 1 a q 1 a q 2 1 a q 1 a q 2 − − − − + + + + 1 2 1 2 Difficulties: � Sequences {y(k)} and {u(k)} are known but {e(k)} is unknown � Non-Linear in parameter model – optimum can’t be computed analytically Solution Strategy Problem solved numerically using nonlinear optimization procedures 4/10/2012 System Identification System Identification 99 99
Automation Lab Invertability of Noise Model IIT Bombay Crucial Property of Noise Model Noise model and its inverse have to be stable i.e. all its poles and zeros should be inside the unit circle (follows from spectral factorization theorem) ∞ ∞ ~ ∑ ∑ e k H q v k h v k i v ( k ) H ( q ) e ( k ) h e ( k i ) − = = − = = − 1 ( ) ( ) ( ) ( ) i i i i 0 = = 0 ∞ ∞ ~ ∑ ∑ H 1 - (q) is stable i.e. h H(q) is stable i.e. h < ∞ < ∞ i i i = i 0 = 0 Note : H(q) is always ' monic' polynomial i.e. h 1 0 = Key problem in identification: Find stable and inversely stable such H(q) and a white noise sequence {e(k)} 4/10/2012 System Identification System Identification 100 100
Automation Lab IIT Bombay Example: A Moving Average Process Consider a first order MA process v(k) e(k) ce(k - 1) = + where {e(k)} is a white noise sequence q c + i.e. H(q) 1 cq - 1 has a pole at q 0 and zero at q - c = + = = = q 1 ∞ ∑ Then, H - 1 ( q ) ( c ) i q i if c 1 − = = − < 1 cq 1 + − i 0 = and e(k) can be recovered from measuremen ts of v(k) ∞ ∑ e(k) ( c ) v ( k i ) i = − − i 0 = Inversion of Noise Model plays a crucial role in the procedure for model identification 4/10/2012 System Identification System Identification 101 101
Automation Lab Example: an ARMA Process IIT Bombay Consider a first order ARMA process v(k) v k e(k) 0.5e(k - 1) = − + + 0 . 8 ( 1 ) where {e(k)} is a white noise sequence 1 0.5q q - 1 + + 0 . 5 i.e. H(q) has a pole at q 0.8 and zero at q - 0.5 = = = = 1 0.8q q - 1 − − 0 . 8 q − − 1 1 0 . 8 Then, H - 1 q q q q = = − − + − − − + 1 2 3 ( ) 1 0 . 13 0 . 067 0 . 0325 .... q + − 1 1 0 . 5 and e(k) can be recovered from measuremen ts of v(k) e(k) v k v k v k v k = − − + − − − + ( ) 0 . 13 ( 1 ) 0 . 067 ( 2 ) 0 . 0325 ( 3 ) ... Note : When noise model is stable and inversely stable ~ h as k increases → 0 k Thus, terms after some k n (depending on decay rate) can be neglected = 4/10/2012 System Identification System Identification 102 102
Automation Lab One Step Prediction IIT Bombay Suppose we have observed v(t) upto t (k - 1) and ≤ we want to predict v(k) based on measuremen ts upto time (k - 1) ∞ ∞ ∑ ∑ v k h e k i e k h e k i = − = + − ( ) ( ) ( ) ( ) i i i i = = 0 1 ˆ v ( k | k 1 ) : Conditiona l expectatio n of − v(k) based on informatio n upto (k - 1) ∞ ∑ ˆ v ( k | k 1 ) h e ( k i ) as e(k) has zero mean − = − i i 1 = [ ] ˆ v ( k | k 1 ) v ( k ) e ( k ) H ( q ) 1 e ( k ) − = − = − H ( q ) 1 − v ( k ) = H ( q ) ~ [ ] ∞ ∑ ˆ v ( k | k 1 ) H 1 ( q ) 1 v ( k ) h v ( k i ) − = − − = − − i i 1 = 4/10/2012 System Identification System Identification 103 103
Automation Lab One Step Output Prediction IIT Bombay Suppose we have observed y(t) and u(t) upto t (k - 1) and ≤ We have y(k) G(q)u(k) v(k) = + and we want to predict y(k) based on informatio n upto time (k - 1) y k k G q u k v k k − = + − ( | 1 ) ( ) ( ) ( | 1 ) [ ] G ( q ) u ( k ) 1 H 1 ( q ) v ( k ) − = + − However, v(k) y(k) - G(q)u(k) = [ ] [ 1 q ] ˆ y ( k | k 1 ) G ( q ) u ( k ) 1 H ( ) y(k) - G(q)u(k) − = + − − Rearrangin g we have [ ] ˆ y ( k | k 1 ) H 1 ( q ) G ( q ) u ( k ) 1 H 1 ( q ) y(k) − − − = + − or [ ] y(k) ˆ H ( q ) y ( k | k 1 ) G ( q ) u ( k ) H ( q ) 1 − = + − 4/10/2012 System Identification System Identification 104 104
Automation Lab ARX: One Step Predictor IIT Bombay Consider 2' nd order ARX model with d 1 = ⎡ b q 2 b q 3 ⎤ ⎡ 1 ⎤ − + − y ( k ) u ( k ) e ( k ) = 1 2 + ⎢ ⎥ ⎢ ⎥ 1 a q 1 a q 2 1 a q 1 a q 2 − − − − + + + + ⎣ ⎦ ⎣ ⎦ 1 2 1 2 One step ahead predictor for this model is b q 2 b q 3 a q 1 a q 2 ⎡ − − ⎤ ⎡ − − ⎤ + − − ˆ y ( k | k 1 ) u ( k ) y ( k ) − = 1 2 + 1 2 ⎢ ⎥ ⎢ ⎥ 1 1 ⎣ ⎦ ⎣ ⎦ which is equivalent to difference equation ˆ y ( k | k 1 ) a y ( k 1 ) a y ( k 2 ) − = − − − − 1 2 b u ( k 2 ) b u ( k 3 ) + − + − 1 2 Advantage : All terms in RHS are known Residual at k'th instant can be estimated as ˆ e ( k ) y ( k ) y ( k | k 1 ) = − − 4/10/2012 System Identification System Identification 105 105
Automation Lab ARMAX: One Step Predictor IIT Bombay Consider 2' nd order ARMAX model with d 1 = ⎡ b q 2 b q 3 ⎤ ⎡ 1 c q 1 c q 2 ⎤ − + − + − + − y ( k ) u ( k ) e ( k ) 1 2 1 2 = + ⎢ ⎥ ⎢ ⎥ 1 a q 1 a q 2 1 a q 1 a q 2 + − + − + − + − ⎣ ⎦ ⎣ ⎦ 1 2 1 2 One step ahead predictor for this model is ⎡ b q 2 b q 3 ⎤ ⎡ ( c a ) q 1 ( c a ) q 2 ⎤ − + − − − + − − ˆ y ( k | k 1 ) u ( k ) y ( k ) − = 1 2 + 1 1 2 2 ⎢ ⎥ ⎢ ⎥ 1 c q 1 c q 2 1 c q 1 c q 2 − − − − + + + + ⎣ ⎦ ⎣ ⎦ 1 2 1 2 which is equivalent to difference equation ˆ ˆ ˆ y ( k | k 1 ) c y ( k 1 | k 2 ) c y ( k 2 | k 3 ) − = − − − − − − 1 2 b u ( k 2 ) b u ( k 3 ) + − + − 1 2 ( ) ( ) c a y ( k 1 ) c a y ( k 2 ) + − − + − − 1 1 2 2 Residual at k'th instant can be estimated as ˆ ( k ) y ( k ) y ( k | k 1 ) ε = − − 4/10/2012 System Identification System Identification 106 106
Automation Lab ARMAX: One Step Predictor IIT Bombay Given : {u(k) : k 0,1,2,...} and guess for model parameters = ˆ ˆ ˆ Assume : y ( 0 | 1 ) y ( 0 ), ; y ( 1 | 0 ) y ( 1 ) ; y ( 2 | 1 ) y ( 2 ) − = = = ˆ ˆ ˆ y ( 3 | 2 ) c y ( 2 | 1 ) c y ( 1 | 0 ) = − − 1 2 ( ) ( ) b u ( 1 ) b u ( 0 ) c a y ( 2 ) c a y ( 1 ) + + + − + − 1 2 1 1 2 2 ˆ ( 3 ) y ( 3 ) y ( 3 | 2 ) ε = − ˆ ˆ ˆ y ( 4 | 3 ) c y ( 3 | 2 ) c y ( 2 | 1 ) = − − 1 2 ( ) ( ) b u ( 2 ) b u ( 1 ) c a y ( 3 ) c a y ( 2 ) + + + − + − 1 2 1 1 2 2 ˆ ( 4 ) y ( 4 ) y ( 4 | 3 ) ε = − ˆ ˆ ˆ y ( 5 | 4 ) c y ( 4 | 3 ) c y ( 3 | 2 ) = − − 1 2 ( ) ( ) b u ( 3 ) b u ( 2 ) c a y ( 4 ) c a y ( 3 ) + + + − + − 1 2 1 1 2 2 ˆ ( 5 ) y ( 5 ) y ( 5 | 4 ) ε = − 4/10/2012 System Identification System Identification 107 107
Automation Lab ARMAX: One Step Predictor IIT Bombay Alternativ ely, using residuals at previous instances [ ] ˆ ( k 1 ) y ( k 1 ) y ( k 1 | k 2 ) ε − = − − − − [ ] ˆ ( k 2 ) y ( k 2 ) y ( k 2 | k 3 ) ε − = − − − − we can rearrange one step predictor as ˆ y ( k | k 1 ) a y ( k 1 ) a y ( k 2 ) b u ( k 2 ) b u ( k 3 ) − = − − − − + − + − 1 2 1 2 c ( k 1 ) c ( k 2 ) + ε − + ε − 1 2 ˆ ( k ) y ( k ) y ( k | k 1 ) ε = − − We can start prediction with initial guesses (0) (1) (2) 0 ε = ε = ε = and, given model parameters (a , a , b , b , c , c ), 1 2 1 2 1 2 we can generate sequence { (k)} ε using sequences {y(k)} and {u(k)}. 4/10/2012 System Identification System Identification 108 108
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.