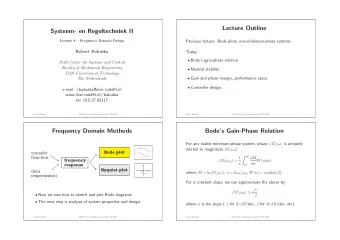
Lecture Outline Regeltechniek Lecture 1 Introduction Information - PowerPoint PPT Presentation
Lecture Outline Regeltechniek Lecture 1 Introduction Information about the course. Robert Babu ska Why is control essential. Delft Center for Systems and Control Faculty of Mechanical Engineering Basic elements of feedback.
Lecture Outline Regeltechniek Lecture 1 – Introduction • Information about the course. Robert Babuˇ ska • Why is control essential. Delft Center for Systems and Control Faculty of Mechanical Engineering • Basic elements of feedback. Delft University of Technology The Netherlands • Modeling dynamic systems. e-mail: r.babuska@tudelft.nl www.dcsc.tudelft.nl/ ˜ babuska tel: 015-27 85117 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 1 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 2 Teaching Staff Course Assistant: Ivo Grondman Lecturer: Prof.Dr. Robert Babuˇ ska, M.Sc. Office hours: ask appointment by email Assistants: Ir. Ivo Grondman Room: 3ME, E-3-310 Dr.ir. Mernout Burger Phone: (015-27) 83371 Robert Babuˇ ska Email: I.Grondman@TUDelft.NL Research: – Artificial intelligence methods for nonlinear control, robotics PhD student: Reinforcement Learning. Teaching: Learning optimal control strategy by interaction with the process. – Knowledge-Based Control Systems (M.Sc. course) Applications to nonlinear systems in robotics and mechatronics. – Integration Project (M.Sc. course, Systems and Control) Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 3 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 4
Course Assistant: Mernout Burger Goals of the Course Office hours: ask appointment by email • Represent dynamic systems as transfer function and state-space models. Room: 3ME, E-3-310 • Analyze closed-loop dynamics by using: Phone: (015-27) 83371 – the root-locus method, Email: M.Burger@TUDelft.NL – Bode plots, – Nyquist plots Postdoc: Model-Based Predictive Control for Intelligent Micro- • Design controllers by using the above methods. Transportation Systems. • Design state-feedback controllers by pole placement. • Use effectively Matlab and Simulink for analysis, design and Scheduling small autonomous water-taxis, optimizing energy effi- simulation. ciency while respecting transportation demand and charging. Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 5 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 6 Course Organization Course Structure • Two lectures every week: – Monday 13:45 – 15:30, 3mE lecture room A and C – Friday 13:45 – 15:30, 3mE lecture room A and C • Instruction (problem-solving) sessions: Please, enroll in the course – week 3 (calendar week 38) via Blackboard! – Thursday 10:45 – 12:30, Aula – lecture room A – week 5 (calendar week 40) – Thursday 10:45 – 12:30, Aula – lecture room A – week 7 (calendar week 42) – Friday 13:45 – 15:30, Aula – lecture room A Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 7 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 8
Course Structure - contn’d Practical Matlab Sessions • Matlab computer sessions: I hear and I forget. I see and I remember. I do and I understand.” – week 4 (calendar week 39) - introduction to Matlab – Confucius – week 6 (calendar week 41) - root locus and freq. domain • Get hands-on experience, learn to use Matlab and Simulink. • Compulsory for everyone who has not passed yet. – week 7 (calendar week 42) - experimental setup (lab) • Work in groups of two students (you choose your partner). Week 4 and 6 in computer room 020 (CT), week 7 in Meetshop. See Blackboard for the schedule. • Assignment in the second and third Matlab session – written report (deliver 1 report per group). • Guest lecture – robotics and wind turbines • Report is graded (1 – 10). – week 3 (calendar week 38) • Final grade = 0.75*exam grade + 0.25*assignment grade, If Wednesday 13:45 – 15:30, 3mE - lecture room A and C final grade < 6 or exam grade < 5 Then resit; If assignment grade < 5 Then additional assignment. • Examination: check Blackboard for dates and times Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 9 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 10 Organization of Matlab Sessions Organization of Matlab Sessions In weeks 4, 6 four sessions in the week are scheduled in computer All students following this course must register for the practical room 020 (CT). Each group only comes once in week 4 and once Matlab sessions via Blackboard (next week). in week 6. Two exceptions: In week 7 in meetshop – DC motor setup • Students who already passed the Matlab practical in one of the 14 sessions are scheduled past years (grade for the report > 5) and who do not wish to and again each group only comes once in week 7. improve their grade must NOT register for the Matlab sessions. For space reasons, you cannot come whenever you wish. • Students who follow this course as a part of the Robotics Minor Instead, please, register (= indicate your non-availability and your (lecturer Dr. Martijn Wisse) must NOT register for the Matlab group partner) via Blackboard and we will assign you to a time sessions (they are already assigned to a time slot). slot. Registration open: September 10 through 16 (24:00), 2012. Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 11 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 12
Complete Schedule Course Material Book: Feedback Control of Dynamic Systems. Franklin, Powell, and Emami-Naeini. Fifth Edition, Prentice Hall. Transparencies: available through Blackboard MATLAB/Simulink software available through Blackboard Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 13 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 14 Recommended Prerequisites Link With the Mechatronics Project Regeltechniek I (WB 2104) or similar Brush up (at least) the following concepts: • Differential equations, Laplace transform. • Transfer functions, block diagrams. • Poles and zeros, stability, dynamic response. • Basic properties of feedback. • PID controller, system type. Chapters 1 through 4 of the course book. Module P2-6: Controller Design for Ed-Ro. Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 15 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 16
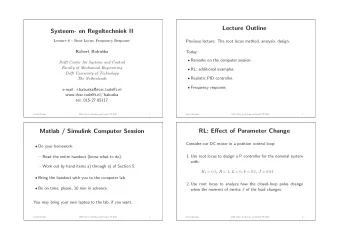
Examination Course Information on the Web • Closed-book exam – no books are allowed Blackboard (mirrored also at www.dcsc.tudelft.nl/˜wb2207) • You may bring only • Basic course information. – your own hand-written notes • Important dates, messages. • It is not allowed to bring any printouts or copies. • Lecture sheets handouts. • Open questions (answers in dedicated boxes). • Sample exams (representative for difficulty degree). • Matlab and Simulink examples. Note: not everything will be discussed in the lectures, some parts of the book are left for self-study. Enroll! Check the page regularly! See ”Exam demands” in the download section of the course web- site. Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 17 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 18 Final Remarks Purpose of Control Where to Run Matlab: Design systems that • Your own computer (download from Blackboard). • maintain desired performance (or optimize performance), • Computer rooms at the faculty, meetshop. • despite disturbances and • changes in the controlled system or its environment Response group: a group of 4–5 students meeting with the lecturer and assistants 3 times (on 18-9, 2-10 and 16-10) at the lunch time Basic principle : – to give feedback on the course, discuss possible improvements, – feed back a measured quantity etc. Interested students, please, come to the lecturer during the – influence system behavior through actuation break. By means of control, we can modify system’s behavior! Main interest is in dynamic systems. Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 19 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 20
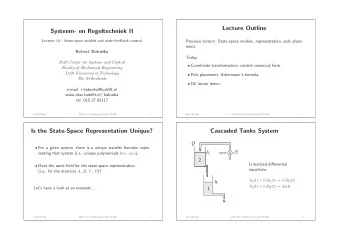
Elements of a Control System Example: Aircraft Autopilot disturbances pilot reference inputs outputs commands engine altitude Autopilot Controller Process elevator speed feedback + less workload for pilot + improved comfort, handling, safety + lower fuel consumption Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 21 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 22 Elements of the Feedback Loop Applications of Control reference disturbances Control systems are invisible, but omnipresent in a tremendous range of processes and products (“from steam engine to space inputs outputs station”): Controller Actuator Process • electronics, home appliances, CD players • industrial processes, manufacturing, robots Sensor • computers, networks, communication systems • transportation systems: cars, planes, spacecraft (our safety often depends on a controller!) Make distinction between: • Signals (lines) – physical quantities, information Feedback is also one of the important basic mechanisms in living • Systems (blocks) – process information organisms. Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 23 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 24
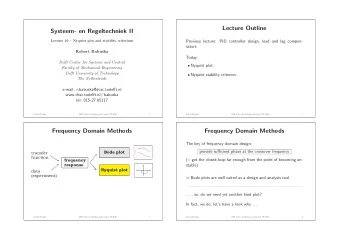
Robotics Process Industry HONDA HONDA Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 25 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 26 Manufacturing Systems Traffic and Transport • Traffic flow control • In-car driver assistance systems • Autonomous vehicles Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 27 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 28
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.