
Lecture Outline Systeem- en Regeltechniek II Previous lecture: - PowerPoint PPT Presentation
Lecture Outline Systeem- en Regeltechniek II Previous lecture: State-space models, representation, pole place- Lecture 12 State-space models and state feedback control ment. Robert Babu ska Today: Delft Center for Systems and Control
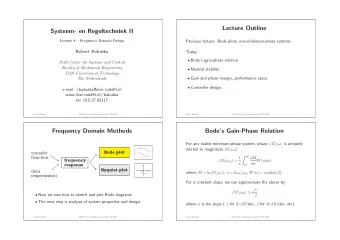
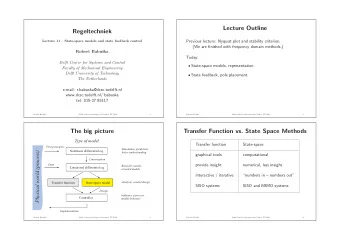
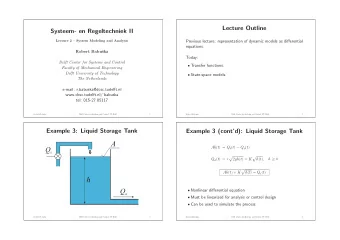
Lecture Outline Systeem- en Regeltechniek II Previous lecture: State-space models, representation, pole place- Lecture 12 – State-space models and state feedback control ment. Robert Babuˇ ska Today: Delft Center for Systems and Control • Coordinate transformation, control canonical form. Faculty of Mechanical Engineering Delft University of Technology • Pole placement, Ackermann’s formula. The Netherlands • DC motor demo. e-mail: r.babuska@tudelft.nl www.dcsc.tudelft.nl/ ˜ babuska tel: 015-27 85117 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 1 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 2 Is the State-Space Representation Unique? Cascaded Tanks System Q • For a given system, there is a unique transfer function repre- u h 2 senting that system (i.e., unique polynomials b ( s ) , a ( s ) ). pump 2 Linearized differential • Does the same hold for the state-space representation equations: (i.e., for the matrices A, B, C, D )? ˙ h 1 ( t ) + 0 . 5 h 1 ( t ) = 0 . 5 h 2 ( t ) h 1 ˙ h 2 ( t ) + 0 . 2 h 2 ( t ) = 2 u ( t ) Let’s have a look at an example . . . 1 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 3 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 4
Cascaded Tanks – State-Space Model Cascaded Tanks – Transfer Function ˙ ˙ h 1 ( t ) + 0 . 5 h 1 ( t ) = 0 . 5 h 2 ( t ) h 1 ( t ) + 0 . 5 h 1 ( t ) = 0 . 5 h 2 ( t ) ˙ ˙ h 2 ( t ) + 0 . 2 h 2 ( t ) = 2 u ( t ) h 2 ( t ) + 0 . 2 h 2 ( t ) = 2 u ( t ) Transfer function: State-space model: G ( s ) = H 1 ( s ) 0 . 5 2 1 U ( s ) = s + 0 . 2 = s + 0 . 5 · s 2 + 0 . 7 s + 0 . 1 − 0 . 5 0 . 5 0 x ( t ) = ˙ x ( t ) + u ( t ) 0 − 0 . 2 2 Corresponding differential equation: � � y ( t ) = x ( t ) 1 0 ¨ h 1 ( t ) + 0 . 7˙ h 1 ( t ) + 0 . 1 h 1 ( t ) = u ( t ) Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 5 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 6 Comparison of State-Space Models Cascaded Tanks – State-Space Model (II) State-space model I (physical): ¨ h 1 ( t ) + 0 . 7˙ h 1 ( t ) + 0 . 1 h 1 ( t ) = u ( t ) − 0 . 5 0 . 5 0 � � State-space model: x ( t ) = ˙ x ( t ) + u ( t ) , y ( t ) = x ( t ) 1 0 0 − 0 . 2 2 − 0 . 7 − 0 . 1 1 z ( t ) = ˙ z ( t ) + u ( t ) State-space model II (from TF): 1 0 0 � � − 0 . 7 − 0 . 1 1 � � y ( t ) = z ( t ) 0 1 z ( t ) = ˙ z ( t ) + u ( t ) , y ( t ) = z ( t ) 0 1 1 0 0 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 7 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 8
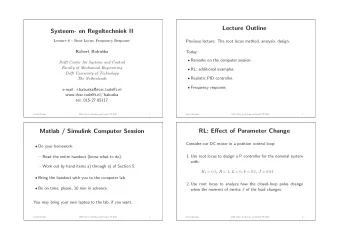
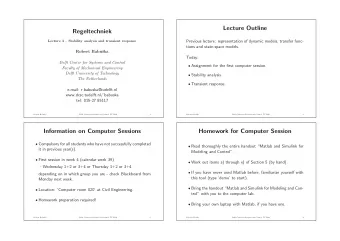
Uniqueness Coordinate Transformation P x 2 • A state-space representation (form) is not unique. 3 z 1 • There are actually infinitely many possible forms. 3 2 z 2 2 2 • How can we transform one into another? 1 1 1 • Are some forms more useful than others? x 1 -2 -1 0 1 2 (P in x-coord. = transf. matrix · P in z-coord.) P x = TP z Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 9 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 10 Coordinate Transformation Implications of Coordinate Transformation • Matrices A , B and C change. Introduce new state vector z such that: x = Tz • However: where T is a non-singular transformation matrix. – the characteristic equation det( sI − A ) and x ( t ) = ATz ( t ) + Bu ( t ) ˙ – the input-output representation (transfer function) do not change (which is logical, isn’t it?). Transformed model: z ( t ) = T − 1 AT z ( t ) + T − 1 B ˙ u ( t ) • Several useful forms, one of them: � �� � � �� � ˜ ˜ A B – control canonical form and y ( t ) = CT z ( t ) + Du ( t ) ���� ˜ C Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 11 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 12
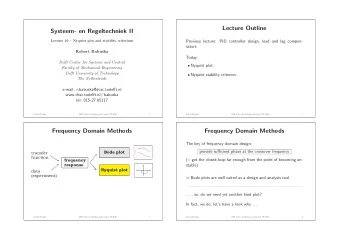
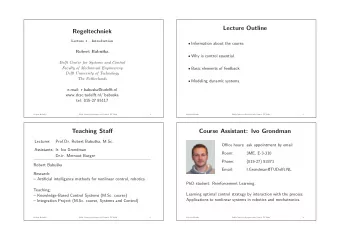
Control Canonical Form Control Canonical Form The system has a transfer function: y G ( s ) = b 1 s n − 1 + · · · + b n − 1 s + b n . . . s n + a 1 s n − 1 + · · · + a n b 1 b 2 b n b n-1 There exists a transformation matrix T such that − a 1 − a 2 . . . − a n − 1 − a n 1 u . . . 1 0 . . . 0 0 0 z ( t ) = ˙ z ( t ) + u ( t ) 0 1 . . . 0 0 0 -a 1 -a 2 -a n-1 -a n . . . . . ... . . . . . . . . . . 0 0 . . . 1 0 0 . . . y ( t ) = ( b 1 . . . b n ) z ( t ) Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 13 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 14 Pole Placement in Control Canonical form Pole Placement – Ackermann’s Formula 1. Transform the model into the control canonical form. − a 1 − a 2 . . . − a n − 1 − a n 1 2. Design the controller in this form (which is very easy). 1 0 . . . 0 0 0 z ( t ) = ˙ z ( t ) + u ( t ) 0 1 . . . 0 0 0 3. Transform the resulting feedback gain vector back. . . ... . . . . . . . . . . . . . Ackermann combined these steps into one formula: 0 0 . . . 1 0 0 1) W − 1 K = (0 . . . 0 d ( A ) c where d ( A ) is the desired characteristic polynomial (in A !), and Coefficients of the characteristic polynomial of ˜ A − ˜ B ˜ K : A 2 B A n − 1 B ] W c = [ B AB . . . � � − a 1 − ˜ − a 2 − ˜ − a n − ˜ ˜ k 1 k 2 . . . k n K ⇒ Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 15 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 16
DC Motor – Position Control Mathematical Model – Motion Equation Equation of motion: J ¨ y + b ˙ y = T u + v v unknown: Goal: track angle reference, suppress load disturbance Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 17 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 18 State-Space Model Controller Design Parameters Equation of motion: J ¨ y + b ˙ y = k m u + v ω d = 30 rad / s (open-loop: ω = 9 . 52 rad/s) State-space model: ζ d = 1 (two identical real poles in − ω d ) x 1 ( t ) = x 2 ( t ) ˙ ⇒ settling time of ≈ 0 . 2 s x 2 ( t ) = − b J x 2 ( t ) + k m J u ( t ) + 1 ˙ J v ( t ) Desired characteristic polynomial: d ( s ) = s 2 + 2 ζ z ω d s + ω 2 0 1 0 0 d x ( t ) = ˙ x ( t ) + u ( t ) + v ( t ) 0 − b k m 1 J J J Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 19 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 20
Asymptotically Constant Disturbances Integrator in the Loop e u r x i y Influence of external forces and friction Process -K i - Equation of motion: J ¨ y + b ˙ y = k m u + v ^ x -K Observer v . . . unknown disturbance In our case, v is mainly due to friction. x ( t ) ˙ A 0 x ( t ) B 0 = + u ( t ) + r ( t ) x i ( t ) ˙ − C 0 x i ( t ) 0 1 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 21 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 22 State-Space: Homework Assignments • Read Sections 7.1 through 7.6.1. • Work out examples in this section. • Work out problems 7.1 – 7.3 (state-space models). • Work out problems 7.19 – 7.22 (pole placement). Verify your results by using Matlab. Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 23
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.