Lecture Outline Systeem- en Regeltechniek II Previous lecture: The - PowerPoint PPT Presentation
Lecture Outline Systeem- en Regeltechniek II Previous lecture: The root locus method, analysis, design. Lecture 6 Root Locus, Frequency Response Robert Babu ska Today: Remarks on the computer session. Delft Center for Systems and
Lecture Outline Systeem- en Regeltechniek II Previous lecture: The root locus method, analysis, design. Lecture 6 – Root Locus, Frequency Response Robert Babuˇ ska Today: • Remarks on the computer session. Delft Center for Systems and Control Faculty of Mechanical Engineering • RL: additional examples. Delft University of Technology • Realistic PID controller. The Netherlands • Frequency response. e-mail: r.babuska@dcsc.tudelft.nl www.dcsc.tudelft.nl/ ˜ babuska tel: 015-27 85117 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 1 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 2 RL: Effect of Parameter Change Matlab / Simulink Computer Session Consider our DC motor in a position control loop: • Do your homework: 1. Use root locus to design a P controller for the nominal system – Read the entire handout (know what to do). with: – Work out by hand items a) through e) of Section 5. K t = 0 . 5 , R = 1 , L = 0 , b = 0 . 1 , J = 0 . 01 • Bring the handout with you to the computer lab. 2. Use root locus to analyze how the closed-loop poles change • Be on time, please, 10 min in advance. when the moment of inertia J of the load changes. You may bring your own laptop to the lab, if you want. Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 3 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 4
DC Motor: Root Locus for P Control DC Motor: Root Locus for P Control G ( s ) = θ ( s ) K t E ( s ) = s [( Ls + R )( Js + b ) + K 2 t ] Consider L = 0 : G ( s ) = θ ( s ) K t k K p = 6 . 125 E ( s ) = t ] = s [( JRs + bR ) + K 2 s ( s + a ) p 1 , 2 = − 17 . 5 a = bR + K 2 k = K t t with JR, JR Design a proportional controller such that the closed loop has a double real pole (use rltool in Matlab). Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 5 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 6 DC Motor: Closed-Loop Step Response RL for Analysis: Varying Moment of Inertia Step Response R s ( ) Y s ( ) 1 K p G s ( ) - DC motor with 0.8 varying J 0.6 Amplitude L ( s ) = G ( s ) K p process and fixed controller in series 0.4 K will represent influence of varying moment of inertia J 0.2 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 Time (sec) Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 7 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 8
RL for Analysis: Varying Moment of Inertia DC Motor: Root Locus for Varying J k n G ( s ) K p = for the given controller gain K p : s ( s + a n ) a n = bR + K 2 k n = K t K p t K = 0 . 1 J n R , with J n = 0 . 01 J n R ⇓ Dividing J n by factor K means multiplying a n and k n by K . J = 10 · J n Characteristic equation: 1 + Ksa n + k n s 2 + K ( sa n + k n ) = 0 ⇒ = 0 s 2 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 9 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 10 Large Inertia: Closed-Loop Step Response Proper Systems A system G ( s ) = B ( s ) Step Response A ( s ) for which deg A ( s ) ≥ deg B ( s ) 1.5 is called proper (has not more zeros than poles). 1 In reality only proper systems exist! Amplitude Consequence: 0.5 the ‘textbook’ form of the PD controller cannot be realized: C ( s ) = K p (1 + T d s ) 0 0 0.5 1 1.5 2 2.5 3 3.5 Time (sec) Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 11 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 12
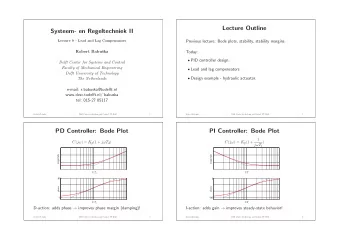
More Realistic PD Controller Satellite Attitude Control Revisited Filtered derivative: � � T d s C ( s ) = K p 1 + ( T d /N ) s + 1 where N is typically in the range 10 – 20 . This means that an additional pole is introduced far left on the real axis. Transfer function: G ( s ) = Θ( s ) T ( s ) = 1 s 2 Compare the RL for ideal and realistic PD controller. Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 13 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 14 PID Controller Used in Practice Anti-Windup Tracking Scheme � � T d s E ( s ) + 1 -y U ( s ) = K p E ( s ) − ( T d /N ) s + 1 Y ( s ) K T s sT i p d Saturation Actuator e v u K p – Derivative action applied to − Y ( s ) instead of E ( s ) . K p + - 1 – Anti-windup scheme used for the integral action s T i - e s (prevent integration when the actuator becomes saturated). 1 T t Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 15 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 16
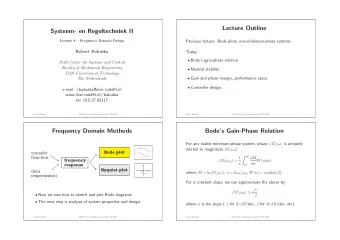
Root Locus: Homework Assignments Representations of Transfer Functions • Read Chapter 5 of the book by Franklin et al. s-plane Transfer • Sketch root loci of first, second and third-order systems with Functions Bode Diagrams real zeros and both real and complex poles by hand. 0 frequency -10 Phase (deg); Magnitude (dB) -20 -30 -40 response -5 0 -1 0 0 -1 5 0 -1 1 0 0 1 0 1 10 Frequency (rad/sec) • For Examples 5.1 through 5.8 in the book verify the results by using Matlab. Frequency response: • Bode plot • Problems at the end of Chapter 5: work out problems 5.1 and 5.2 by hand and a selection of the remaining problems by using • Nyquist plot Matlab. Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 17 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 18 Frequency Response: Setting Frequency Response: Laplace Transform Consider a linear time invariant system: u ( t ) = M sin ωt U ( s ) Y ( s ) G ( s ) Mω Mω U ( s ) = L { u ( t ) } = s 2 + ω 2 = ? ( s + jω )( s − jω ) Mω Y ( s ) = G ( s ) U ( s ) = G ( s ) ( s + jω )( s − jω ) Input: u ( t ) = M sin ωt y ( t ) = ? What is the steady-state output? Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 19 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 20
Partial Fraction Expansion Compute Coefficients K and K* General Laplace transform of the output: In steady state: K ∗ K Y ( s ) = s − jω + m i n K ∗ K ij K s + jω � � Y ( s ) = ( s − p i ) j + s − jω + s + jω i =1 j =1 K = Y ( s )( s − jω ) | s = jω Corresponding time signal: � Mω � m i n = G ( s ) ( s + jω )( s − jω )( s − jω ) � � � + Ke jωt + K ∗ e − jωt K ij t j e p i t � s = jω y ( t ) = � �� � periodic signal i =1 j =1 � = G ( s ) Mω = G ( jω ) M � �� � � transient � s + jω 2 j � s = jω Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 21 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 22 Frequency Response: Summary Compute Coefficients K and K* K = M 2 j G ( jω ) = M 2 j | G ( jω ) | e j ∠ G ( jω ) u ( t ) = M sin ωt y ( t ) ≃ M | G ( jω ) | sin( ωt + ∠ G ( jω )) and K ∗ = − M 2 j G ( − jω ) = − M | G ( jω ) | . . . magnitude (gain) 2 j | G ( jω ) | e − j ∠ G ( jω ) ∠ G ( jω ) . . . phase Ke jωt + K ∗ e − jωt = M | G ( jω ) | e j ( ωt + ∠ G ( jω )) − e − j ( ωt + ∠ G ( jω )) 2 j = M | G ( jω ) | sin( ωt + ∠ G ( jω )) Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 23 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 24
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.