Lecture Outline Regeltechniek Previous lecture: Stability and - PowerPoint PPT Presentation
Lecture Outline Regeltechniek Previous lecture: Stability and transient response. Lecture 4 Basics of Feedback Control Robert Babu ska Today: Steady-state response. Delft Center for Systems and Control Faculty of Mechanical
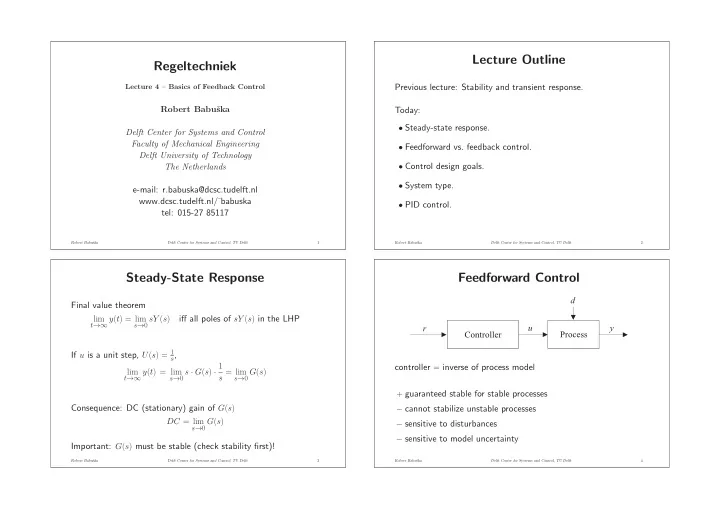
Lecture Outline Regeltechniek Previous lecture: Stability and transient response. Lecture 4 – Basics of Feedback Control Robert Babuˇ ska Today: • Steady-state response. Delft Center for Systems and Control Faculty of Mechanical Engineering • Feedforward vs. feedback control. Delft University of Technology • Control design goals. The Netherlands • System type. e-mail: r.babuska@dcsc.tudelft.nl www.dcsc.tudelft.nl/ ˜ babuska • PID control. tel: 015-27 85117 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 1 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 2 Steady-State Response Feedforward Control d Final value theorem iff all poles of sY ( s ) in the LHP t →∞ y ( t ) = lim lim s → 0 sY ( s ) u y r Controller Process If u is a unit step, U ( s ) = 1 s , s → 0 s · G ( s ) · 1 controller = inverse of process model t →∞ y ( t ) = lim lim s = lim s → 0 G ( s ) + guaranteed stable for stable processes Consequence: DC (stationary) gain of G ( s ) − cannot stabilize unstable processes DC = lim s → 0 G ( s ) − sensitive to disturbances − sensitive to model uncertainty Important: G ( s ) must be stable (check stability first)! Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 3 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 4
Feedback Control Feedback vs. Feedforward: Cruise Control d r u y Process Controller controller � = inverse of process model + can stabilize unstable processes + less sensitive to disturbance + less sensitive to model uncertainty − can potentially destabilize a stable process Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 5 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 6 Feedback vs. Feedforward: Cruise Control Closed-Loop Transfer Function slope��wind R s ( ) E s ( ) U s ( ) Y s ( ) + desired C s ( ) G s ( ) - speed gas speed Controller Car Y = GC ( R − Y ) slope��wind (1 + GC ) Y = GCR desired speed gas speed Controller Car G cl = Y GC - R = 1 + GC Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 7 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 8
Controller Design: Goals and Choices Reference Tracking: System Type R s ( ) E s ( ) U s ( ) Y s ( ) + • Different control goals, for instance: C s ( ) G s ( ) - – stabilize an unstable process – track a specific type of reference signal – reduce influence of disturbances How well will the closed-loop system track a given reference sig- – improve performance (e.g., speed of response) nal? • Structure of the controller (number of poles and zeros) Consider reference input: R ( s ) = 1 s k k = 1 . . . step, k = 2 . . . ramp, etc. • Parameters (location of poles and zeros, gain) Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 9 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 10 Common Reference Signals Steady-State Error R s ( ) E s ( ) U s ( ) Y s ( ) + C s ( ) G s ( ) - R ( s ) = 1 step (position) r ( t ) = 1( t ) s R ( s ) = 1 r ( t ) = t ramp (velocity) s 2 r ( t ) = t 2 R ( s ) = 1 parabola (acceleration) 2 1 s 3 E ( s ) = 1 + L ( s ) R ( s ) with L ( s ) = G ( s ) C ( s ) (loop transfer) Steady-state error (final value theorem): s 1 + L ( s ) · 1 s e ss = lim s → 0 sE ( s ) = lim 1 + L ( s ) R ( s ) = lim s k s → 0 s → 0 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 11 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 12
Steady-State Error: Example 1 Steady-State Error: Example 2 K K Consider the following loop transfer: L ( s ) = Consider the following loop transfer: L ( s ) = s + 1 s ( s + 1) Steady-state error: Steady state error: s 2 ( s + 1) 1 + L ( s ) · 1 s + 1 + K · 1 s ( s + 1) s 1 + L ( s ) · 1 s s ( s + 1) + K · 1 e ss = lim s k = lim e ss = lim s k = lim s k s k s → 0 s → 0 s → 0 s → 0 Step ( R ( s ) = 1 Step ( R ( s ) = 1 s ) : s ) : s 2 ( s + 1) s ( s + 1) + K · 1 e ss = lim s = 0 s + 1 + K · 1 s ( s + 1) 1 e ss = lim s = 1 + K = finite constant s → 0 s → 0 Ramp ( R ( s ) = 1 s 2 ) : Ramp ( R ( s ) = 1 s 2 ) : s + 1 + K · 1 s ( s + 1) s 2 ( s + 1) s ( s + 1) + K · 1 s 2 = 1 e ss = lim s 2 = ∞ K = finite constant e ss = lim s → 0 s → 0 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 13 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 14 Steady-State Error in General System Type → Controller Structure Loop transfer: L ( s ) = L 0 ( s ) If zero steady-state error required (for a given reference type) s m s m s · 1 s m + L 0 ( s ) · 1 s and e ss = lim s k = lim 1 + L 0 ( s ) s k s → 0 s → 0 s m the loop transfer is not of sufficiently high type Zero steady-state error: then e ss = 0 iff m ≥ k add integrator(s) in the controller. System type m = number of pure integrators in loop transfer (see also PID control) Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 15 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 16
Proportional Control Closed-Loop Transfer With P Controller d K Process (example): G ( s ) = s ( s + a ) u y r e Proportional controller: C ( s ) = K p P Process - KK p Closed-loop poles – solutions of: 1 + s ( s + a ) = 0 s 2 + as + KK p = 0 Controller: • static gain K p : u ( t ) = K p e ( t ) = K p ( r ( t ) − y ( t )) K p has some influence on the closed-loop poles (does modify the stiffness, but not the damping) Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 17 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 18 Closed-Loop Transfer with PD Controller Proportional-Derivative (PD) Control K d Process (example): G ( s ) = s ( s + a ) Proportional controller: C ( s ) = K p + K d s u y r e PD Process - Closed-loop poles – solutions of: 1 + K ( K p + K d s ) = 0 s ( s + a ) s 2 + ( a + KK d ) s + KK p = 0 Controller: de ( t ) • dynamic: u ( t ) = K p e ( t ) + K d we can choose K p and K d to completely determine the closed-loop dt • K p and K d are the proportional, and derivative gains, respec- poles (for this second-order process) tively Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 19 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 20
PID Control When Should We Use Integral Action? d If zero steady-state error required (for a given reference type) and the loop transfer is not of sufficiently high type u y r e PID Process - Example: L ( s ) = G ( s ) K p = KK p τs + 1 Reference = step: R ( s ) = 1 s Controller: � t de ( t ) Required: zero steady-state error e ss = 0 • dynamic: u ( t ) = K p e ( t ) + K i 0 e ( τ ) dτ + K d dt • K p , K i and K d are the proportional, integral and derivative Conclusion: as system type is 0 (no integrator), use PI! gains, respectively Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 21 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 22 Integral Action in Differential Equation With a PI Controller Process (example): y + b ˙ y = u Process (example): y + b ˙ y = u � Proportional controller: u = K p ( r − y ) PI controller: u = K p ( r − y ) + K i ( r − y ) for r = const: ˙ u = − K p ˙ y + K i ( r − y ) Closed-loop differential equation: y + b ˙ y = K p r − K p y K p Closed-loop differential equation: ˙ y + b ¨ y = − K p ˙ y + K i r − K i y In steady state ( ˙ y = 0 ): y = r ⇒ y ≈ r (for large K p ) 1 + K p In steady state ( ¨ y = 0 ): 0 = K i r − K i y y = ˙ ⇒ y = r non-zero steady-state error! (system is of type 0) no steady-state error! Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 23 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 24
Influence of the PID Parameters Implementation: Computer Control • K p . . . stiffness (speed of response), but also oscillations Computer Clock • K d . . . damping (less oscillations), but sensitive to noise • K i . . . remove steady-state error, but more overshoot { ( )} u t u(t) y(t) { ( )} y t k (re-tune K p , K i ) k Algorithm A-D D-A Process Tuning: • Experimental tuning (often used in practice, sometimes computer- assisted) Controller implemented on a digital computer, • Model-based analysis and design (rest of our course) runs in discrete time and on discrete-valued data. Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 25 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 26
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.