Lecture Outline Regeltechniek Previous lecture: representation of - PowerPoint PPT Presentation
Lecture Outline Regeltechniek Previous lecture: representation of dynamic models, transfer func- Lecture 3 Stability analysis and transient response tions and state-space models. Robert Babu ska Today: Delft Center for Systems and
Lecture Outline Regeltechniek Previous lecture: representation of dynamic models, transfer func- Lecture 3 – Stability analysis and transient response tions and state-space models. Robert Babuˇ ska Today: Delft Center for Systems and Control • Assignment for the first computer session. Faculty of Mechanical Engineering Delft University of Technology • Stability analysis. The Netherlands • Transient response. e-mail: r.babuska@tudelft.nl www.dcsc.tudelft.nl/ ˜ babuska tel: 015-27 85117 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 1 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 2 Information on Computer Sessions Homework for Computer Session • Compulsory for all students who have not successfully completed • Read thoroughly the entire handout “Matlab and Simulink for it in previous year(s). Modeling and Control”. • First session in week 4 (calendar week 39) • Work out items a) through e) of Section 5 (by hand). – Wednesday 1+2 or 3+4 or Thursday 1+2 or 3+4 • If you have never used Matlab before, familiarize yourself with depending on in which group you are - check Blackboard from this tool (type ‘demo’ to start). Monday next week. • Bring the handout “Matlab and Simulink for Modeling and Con- • Location: ’Computer room 020’ at Civil Engineering. trol” with you to the computer lab. • Homework preparation required! • Bring your own laptop with Matlab, if you have one. Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 3 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 4
Purpose of Analysis Stability – General Notions Analyze the available model in order to: • Nonlinear systems – stability of a trajectory (solutions of differ- • Understand the behavior of the process under study. ential equations). • Define meaningful specification for the controlled system. • Mostly we consider stability of equilibria, i.e., solutions of 0 = • Give basis for control design choices (controller structure, pa- f ( x 0 , u 0 ) . rameters). • One system may have many equilibria, some stable, some un- We are mainly interested in: stable. • Stability of the open-loop process. • Linear systems – stability of an equilibrium implies stability of the whole system. • Transient response (impulse, step, ramp). • Steady-state response (constant or sinusoidal input). Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 5 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 6 Stability of LTI Systems Real Poles y ( t ) = Ke pt K � m U ( s ) = b 0 s m + b 1 s m − 1 + · · · + b m j =1 ( s − z j ) G ( s ) = Y ( s ) = s n + a 1 s n − 1 + · · · + a n � n i =1 ( s − p i ) y t ( ) p�=�0 y t ( ) p�>�0 y t ( ) p < 0 n � K i e p i t Response to initial conditions: y ( t ) = i =1 t t t p i are real or complex poles of the system The exponential terms decay iff Re { p i } < 0 A single pole p = 0 . . . system marginally stable = the system is stable Multiple poles at p = 0 . . . system unstable Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 7 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 8
Complex Poles Transient and Steady-State Response • Responses to an arbitrary input signal cannot be computed an- y ( t ) = K ′ e σt sin( ωt + ϕ ) alytically (we have to resort to simulation). • However, some specific input signals are useful: ( ) ( ) y t y t y t ( ) – step response � <�0 � =�0 � >�0 – impulse response – response to a ramp input (ramp response) t t t – response to a sinusoidal input (frequency response) • Importance both for analysis and for identification of model parameters from measured data. Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 9 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 10 First-Order Systems: Step Response First-Order Systems: Step Response y τs + 1 · 1 1 Y ( s ) = G ( s ) U ( s ) = s 1 Expand in partial fractions: Y ( s ) = 1 τ 63% s − τs + 1 = 1 1 s − s + 1 /τ Corresponding time signal: t y ( t ) = 1 − e − t/τ 3 τ . . . 95% , 4 τ . . . 98% , 5 τ . . . 99% of steady state value Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 11 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 12
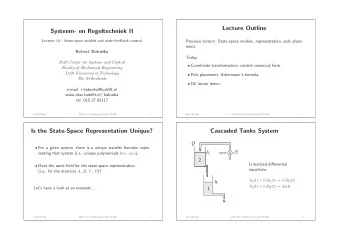
Estimate Parameters From Step Response Demo: Rotational Pendulum m 2 • Assume we have a stable first-order process with unknown gain k m u M ( θ )¨ θ + C ( θ, ˙ θ ) ˙ θ + G ( θ ) = and time constant: K 0 l 2 G ( s ) = m 2 g τs + 1 P 1 + P 2 + 2 P 3 cos θ 2 P 2 + P 3 cos θ 2 • Apply a step input to the process (choose a suitable amplitude, M ( θ ) = P 2 + P 3 cos θ 2 P 2 not necessarily the unit step). m 1 b 1 − P 3 ˙ − P 3 ( ˙ θ 1 + ˙ θ 2 sin θ 2 θ 2 ) sin θ 2 l 1 • Plot the corresponding output and read the parameters from C ( θ, ˙ θ ) = P 3 ˙ θ 1 sin θ 2 b 2 the graph. m 1 g − g 1 sin θ 1 − g 2 sin( θ 1 + θ 2 ) G ( θ ) = motor − g 2 sin( θ 1 + θ 2 ) Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 13 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 14 Linearized Model First-Order Systems: Ramp Response 661 . 2903( s 2 + 49 . 05) G ( s ) = θ 2 ( s ) τs + 1 · 1 1 U ( s ) = Y ( s ) = s ( s + 33 . 06)( s 2 + 0 . 6783 s + 98 . 11) s 2 Expand in partial fractions: τ 2 Y ( s ) = 1 s 2 − τ s + • one pole in origin (pure integration) τs + 1 • one fast real pole (motor mechanical time constant) Corresponding time signal: • a pair of poorly damped complex poles y ( t ) = t − τ + τe − t/τ • a pair of complex zeros Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 15 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 16
First-Order Systems: Impulse Response Relationship Between the Responses 1 G ( s ) · 1 • Ramp response: Y ( s ) = G ( s ) U ( s ) = τs + 1 · 1 s 2 G ( s ) · 1 Expand in partial fractions: • Step response: (derivative of ramp response) s 1 1 /τ Y ( s ) = τs + 1 = • Impulse response: G ( s ) · 1 (derivative of step response) s + 1 /τ Corresponding time signal: So far we considered τ > 0 (asymptotically stable first-order sys- y ( t ) = 1 τ e − t/τ tem). Work out the impulse, step and ramp response for τ < 0 (unstable system) and for an integrator ( G ( s ) = 1 /s ). Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 17 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 18 Second-Order System Second-Order System ω 2 k n H ( s ) = = s 2 + 2 ζω n s + ω 2 ( s + σ ) 2 + ω 2 2 ω n d Im n H s b g = θ 2 2 s 2 s + ζω + ω n n ω n ω n : undamped natural frequency σ = ζω Re n σ ζ : relative damping 2 n 1 ω = ω − ζ ω d d σ : attenuation (damping) 1 − sin θ = ζ ω d : damped natural frequency Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 19 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 20
Second-Order System: Time Response Influence of Damping 2 y ( t ) = 1 − e − σt � σ � cos ω d t + sin ω d t 1.8 ω d 1.6 z=0.0 z=0.1 1.4 z=0.3 y z=0.5 1.2 z=0.7 z=0.9 y(t) 1 z=1.0 0.8 0 0.6 0.4 0.2 0 0 2 4 6 8 10 12 t 0 t t+T Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 21 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 22 Step Response Characteristics Relation to Natural Frequency and Damping t p 1.4 18 . t = 1.2 M p r ω n ± 1% 1 π 90% t = 0.8 p 2 ω 1 − ζ n 0.6 y(t) 4 6 . t = for ± 1% 0.4 s ζω n 0.2 πζ 10% − 2 0 1 − ζ M e = t r p t s time Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 23 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 24
✁ ✂ Performance Specifications for Closed-Loop Performance Specifications: Example 1 8 . 18 . 06 . . 28 . rad s . t ≤ s ω ≥ ω ≥ ω ≥ r n n n t t r M ≤ 10 % 0 6 . r ζ ≥ p ζ ≥ ζ M t t M d i 3 . p M t ≤ s 15 . ζ ≥ ζ σ ≥ r s p s p 4 6 . σ ≥ 4 6 . t s σ ≥ t Im s 3 θ 2 Im Im Im 1 σ Re 0 ω n Re Re Re -1 1 1 -5 �����-4�����-3����-2�����-1�� 0������1 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 25 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 26 Additional Pole in the System Zero in a Second-Order System ω 2 ω 2 n ω n γ n ( bs + 1) H ( s ) = H ( s ) = � �� � s 2 + 2 ζω n s + ω 2 s 2 + 2 ζω n s + ω 2 s + γω n n n ω 2 ω 2 n s n H ( s ) = + b · s 2 + 2 ζω n s + ω 2 s 2 + 2 ζω n s + ω 2 The 3 rd order system can be accurately approximated by a second n n � �� � � �� � H 0 H d order system if γ ≥ 10 Time response of H d is the derivative of response of H 0 . In such a case, the two complex poles are dominant. Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 27 Robert Babuˇ ska Delft Center for Systems and Control, TU Delft 28
Recommend









More recommend
Explore More Topics
Stay informed with curated content and fresh updates.