Digital Image Fundamentals and Image Acquisition 1/18/2011 1 - PDF document
18/01/2011 ELE 882: Introduction to Digital Image Processing (DIP) Lecture Notes 2: 2 Digital Image Fundamentals and Image Acquisition 1/18/2011 1 Image Acquisition 1/18/2011 2 1 18/01/2011 Image description f ( x , y ) :
18/01/2011 ELE 882: Introduction to Digital Image Processing (DIP) Lecture Notes 2: 2 Digital Image Fundamentals and Image Acquisition 1/18/2011 1 Image Acquisition 1/18/2011 2 1
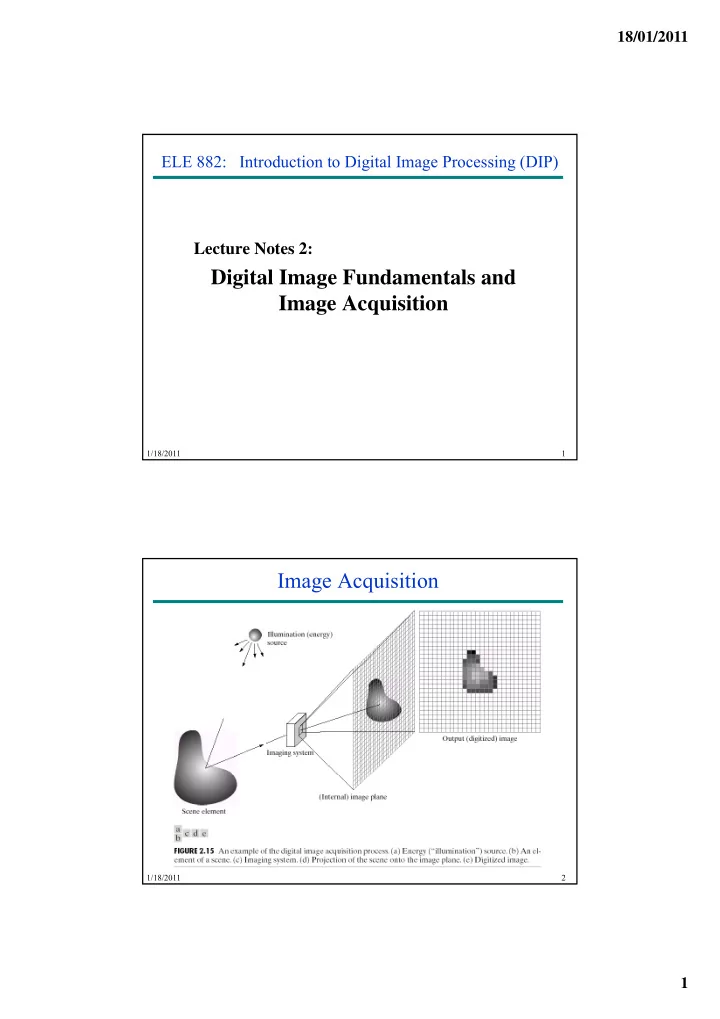
18/01/2011 Image description f ( x , y ) : intensity/brightness of the image at spatial coordinates ( x , y ) 0< f ( x , y )< ∞ and determined by 2 factors: 0 f ( ) d d t i d b 2 f t illumination component i ( x , y ): amount of source light incident reflectance component r(x,y) : amount of light reflected by objects f ( x , y ) = i ( x , y ) r ( x , y ) where h 0< i ( x , y )< ∞ : determined by the light source 0< r ( x , y )<1: determined by the characteristics of objects 1/18/2011 3 Sampling and Quantization 1/18/2011 4 2
18/01/2011 Sampling and Quantization 1/18/2011 5 1/18/2011 6 3
18/01/2011 Sampling and Quantization Digitization of the spatial coordinates ( x , y ) Sampling: Quantization : Digitization in amplitude (also called gray- level quantization ) q ) 8 bit quantization: 2 8 = 256 gray levels (0: black, 255: white) Binary (1 bit quantization): 2 gray levels (0: black, 1: white) Commonly used number of samples (resolution) Digital still cameras: 640x480, 1024x1024, up to 4064 x 2704 Digital video cameras: 640x480 at 30 frames/second 1920x1080 at 60 f/s (HDTV) 1/18/2011 7 Sampling and Quantization An M x N digital image is expressed as Columns Columns ( 0 , 0 ) ( 0 , 1 ) . . . ( 0 , 1 ) f f f N ( 1 , 0 ) ( 1 , 1 ) . . . ( 1 , 1 ) Rows f f f N . . . . . . . . . . . . . . . . . . ( 1 , 0 ) ( 1 , 1 ) . . . ( 1 , 1 ) f M f M f M N N : No of Columns M : No of Rows 1/18/2011 8 4
18/01/2011 Digital Images Digital images are 2D arrays (matrices) of numbers: 1/18/2011 9 Sampling 1/18/2011 10 5
18/01/2011 Sampling 1/18/2011 11 Quantization 1/18/2011 12 6
18/01/2011 Quantization 1/18/2011 13 RGB (color) Images Red + Blue + Green Red + Blue + Green Red Green Blue 1/18/2011 14 7
18/01/2011 Image acquisition Single imaging sensor Line sensor Array sensor 1/18/2011 15 Image acquisition 1/18/2011 16 8
18/01/2011 Image acquisition Image acquisition through linear sensor strip linear sensor strip Image acquisition through circular sensor strip 1/18/2011 17 Digital Camera Technologies CCD (Charge Coupled Device) – Capacitive device p CMOS (Complementary magnetic oxide) A CCD system typically requires 2–5 watts (digital output), compared to 20–50 milliwatts for the same pixel throughput using an active-pixel system 1/18/2011 18 9
18/01/2011 Digital Camera Technologies CCD Array Cameras Consists of sensor elements/ photo detectors (active devices) and Consists of sensor elements/ photo detectors (active devices) and charge storage devices also called charge buckets Every element in the array is linked (charge coupled) to other element. Charges are transferred serially out of the array through shifting charges from one element to the other. g 1/18/2011 19 Digital Camera Technologies CCD Array Cameras F Frame Transfer T f Architecture 1/18/2011 20 10
18/01/2011 Digital Camera Technologies CCD Array Cameras Interline Transfer I t li T f Architecture 1/18/2011 21 Digital Camera Technologies Charge transfer in CCD Cameras Varying voltages on a set of three electrodes shift electrons from one pixel to another 1/18/2011 22 11
18/01/2011 Digital Camera Technologies CMOS Array Cameras Standard semiconductor production line Active pixel architecture Photo-detector and amplifier are both fabricated inside each pixel. 1/18/2011 23 Digital camera technologies comparison CCD (Charge Coupled Device) CMOS (Complementary Metal Oxide Semiconductor) – Specialized fabrication – Cheaper technology techniques are used so expensive technology expensive technology – Smaller size S ll i – Larger size – Low power consumption – Higher power consumption – Readout for selective area of an because of the capacitive image is possible architecture – Amplifier and additional – Always have to read out the circuitry can be fabricated whole image g inside each pixel inside each pixel. – Resolution is limited by – Higher resolution possible sensor elements size – Stronger noise due to higher – Less on-chip circuitry so dark currents because of more lesser dark currents and on-chip circuitry noise 1/18/2011 24 12
18/01/2011 Acquisition of color images Single sensor assembly For still scenes Three sensors with prisms p Sensor arrays a. Stripe filter pattern b. Bayers filter pattern 1/18/2011 25 Acquisition of color images Fabrication of CMOS colored sensors 1/18/2011 26 13
18/01/2011 Scanning Schemes Interlaced scanning (used in TV) Read/display all even numbered lines even-numbered lines (even field, half-size) Restart Read/display all odd- numbered lines (odd A typical Interlaced Scanning scheme field, half-size) Stitch the even and Stitch the even and odd fields together and form a single, full-size frame Output the full-size frame 1/18/2011 27 Interlaced scanning When motion is present the interlaced scanning produces blurring in the image 1/18/2011 28 14
18/01/2011 Scanning Schemes Progressive Scanning Immediately transfer an entire frame at once from the image sensor without performing any line-interlacing. p g y g Suitable for fast motion detection applications Incompatible with standard television systems. Getting popular in digital cameras (computer applications) 1/18/2011 29 Basic relationships between pixels Arrangement of pixels: 0 1 1 0 1 0 0 0 1 4 neighbours N 4 ( p ): 4 i hb N ( ) 1 1 0 1 0 0 Diagonal neighbours N D ( p ): 0 1 1 0 1 8 neighbours N 8 ( p ) = N D ( p ) U N 4 ( p ) : 0 1 1 0 1 0 0 0 1 1/18/2011 30 15
18/01/2011 Basic relationships between Pixels Connectivity between pixels: An important concept used in establishing boundaries of objects and components of regions Two pixels p and q are connected if – They are adjacent in some sense – If their gray levels satisfy a specified criterion of similarity V: Set of gray level values used to define the criterion of similarity 4-connectivity: If gray-level p , q V , and q N4(p) 8 8-connectivity: i i If gray-level p , q V , and q N8(p) If l l d N8( ) V m-connectivity (mixed connectivity): Gray-level p , q V , and q satisfies one of the following: 1) q N4(p), 2) q N D (p) and N 4 (p) ∩ N 4 (q) has no values from V 1/18/2011 31 Basic relationships between pixels Mixed Connectivity: Note: Mixed connectivity can eliminate the multiple path connections that often occurs in 8-connectivity i h f i 8 i i Pixel 8-adjacent to the m-adjacency arrangement center pixel 1/18/2011 32 16
18/01/2011 Basic relationships between pixels Path Let coordinates of pixel p: ( x , y ), and of pixel q: ( s , t ) A path from p to q is a sequence of distinct pixels with A path from p to q is a sequence of distinct pixels with coordinates: ( x 0 , y 0 ), ( x 1 , y 1 ), ......, ( x n , y n ) where ( x 0 , y 0 ) = ( x , y ) & ( x n , y n ) = ( s , t ), and ( x i , y i ) is adjacent to ( x i- 1 , y i- 1 ) 1 i n Regions A set of pixels in an image where all component pixels are p g p p connected Boundary of a region A set of pixels of a region R that have one of more neighbors that are not in R 1/18/2011 33 Distance Measures Given coordinates of pixels p, q, and z: ( x , y ), ( s , t ), and ( u , v ) Euclidean distance between p and q: 2 2 ( , ) ( ) ( ) D e p q x s y t – The pixels with D e distance r from (x,y) define a disk of radius r centered at ( x , y ) City-block distance between p and q: ( , ) D p q x s y t 4 – The pixels with D 4 distance r from (x,y) form a diamond centered at ( x , y ) – the pixels with D 4 = 1 are the 4-neighbors of (x,y) Chessboard distance between p and q: ( , ) max(| |, | |) D p q x s y t 8 – The pixels with D 8 distance r from (x,y) form a square centered at ( x , y ) – The pixels with D 8 = 1 are the 8-neighbors of (x,y) 1/18/2011 34 17
18/01/2011 Reading Assignment Chapters 1 and 2 of “ Digital Image Processing ” by Gonzalez. Chapters 2 of “ Digital Image Processing using Chapters 2 of Digital Image Processing using MATLAB ” by Gonzalez. 1/18/2011 35 18
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.