Image Restoration Image Enhancement and Image Restoration both deal - PowerPoint PPT Presentation
Image Restoration Image Enhancement and Image Restoration both deal with improving images. Image Analysis In Image Enhancement, the quality of the improved image was Image Restoration and Reconstruction judged subjectively. In contrast, Image
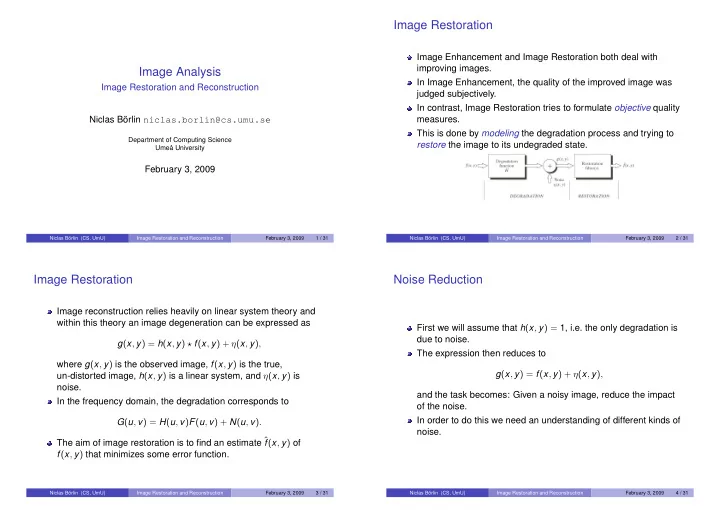
Image Restoration Image Enhancement and Image Restoration both deal with improving images. Image Analysis In Image Enhancement, the quality of the improved image was Image Restoration and Reconstruction judged subjectively. In contrast, Image Restoration tries to formulate objective quality measures. Niclas Börlin niclas.borlin@cs.umu.se This is done by modeling the degradation process and trying to Department of Computing Science restore the image to its undegraded state. Umeå University February 3, 2009 Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 1 / 31 Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 2 / 31 Image Restoration Noise Reduction Image reconstruction relies heavily on linear system theory and within this theory an image degeneration can be expressed as First we will assume that h ( x , y ) = 1, i.e. the only degradation is due to noise. g ( x , y ) = h ( x , y ) ⋆ f ( x , y ) + η ( x , y ) , The expression then reduces to where g ( x , y ) is the observed image, f ( x , y ) is the true, g ( x , y ) = f ( x , y ) + η ( x , y ) , un-distorted image, h ( x , y ) is a linear system, and η ( x , y ) is noise. and the task becomes: Given a noisy image, reduce the impact In the frequency domain, the degradation corresponds to of the noise. In order to do this we need an understanding of different kinds of G ( u , v ) = H ( u , v ) F ( u , v ) + N ( u , v ) . noise. The aim of image restoration is to find an estimate ˆ f ( x , y ) of f ( x , y ) that minimizes some error function. Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 3 / 31 Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 4 / 31
Noise Reduction Gaussian noise The most common density function to use is the Gaussian (normal) distribution defined by 1 e − ( z − ¯ z ) 2 / 2 σ 2 , p ( z ) = √ Noise is here a stochastic component that is added to an 2 πσ intensity value. z is the mean value (average) of the distribution, σ 2 is the where ¯ We will talk about two different kinds of noise: variance of the distribution. Position-independent noise and periodic noise . For position-independent noise we assume that the properties About 70 % of the probability mass lies in the interval ¯ are global for the image, i.e. there is no spatial correlation tied to z ± σ the properties of the noise. and about 95 % of the mass is in the interval ¯ z ± 2 σ . The values of a stochastic variable are generally described by its probability density function . The normal distribution is symmetric about its mean and is thus not optimal to model non-symmetric noise. Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 5 / 31 Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 6 / 31 Rayleigh noise (?) Erlang (gamma) noise The Rayleigh pdf is defined as The Erlang (gamma) pdf is defined as � 2 � a b z b − 1 b ( z − a ) e − ( z − a ) 2 / b ( b − 1 )! e − az for z ≥ a for z ≥ 0 p ( z ) = otherwise . p ( z ) = otherwise , 0 0 π b / 4 and σ 2 = b ( 4 − π ) / 4. z = a / b and σ 2 = b / a 2 . For this distribution, ¯ � z = a + with ¯ The Rayleigh is an example of an unsymmetric pdf. Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 7 / 31 Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 8 / 31
Exponential noise Uniform noise The Exponential pdf is The density function for a uniform distribution is given by � ae − az 1 for z ≥ 0 � for a ≤ z ≥ b b − a p ( z ) = p ( z ) = 0 for z < 0 0 otherwise z = 1 / a and σ 2 = 1 / a 2 . z = ( a + b ) / 2 and σ 2 = ( b − a ) 2 / 12. and has ¯ and has ¯ Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 9 / 31 Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 10 / 31 Salt and pepper noise Noise test images And finally the pdf for salt and pepper noise P a for z = a p ( z ) = P b for z = b 0 otherwise z = aP a + bP b and σ 2 = P b b 2 + P a a 2 − ¯ with ¯ z . Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 11 / 31 Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 12 / 31
Periodic noise Periodic noise The noise can also be periodic. Any pure sinusoidal structure will appear as a pair of peaks in the spektra on opposite sides of the zero frequency in the spectra of the image. Noisy image Fourier spectra, log scale The distance from the zero frequency corresponds to the frequency of the structure. linear scale linear scale, no DC Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 13 / 31 Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 14 / 31 Determining the noise type Determining the noise type If the noise is periodic, we will see it in the image and/or in the We may also study the histogram of a part of the image that Fourier spectrum. should be homogenous. Otherwise, we need to approximately determine the pdf to be If we calculate the mean and variance of the noise, we may be able to choose what filter to use. able to estimate the parameters for the density functions. In some cases we might know something about the source(s) of the noise. ◮ Gaussian-type noise often occur due to electronic circuit noise and sensor noise due to poor illumination. ◮ Rayleigh noise may occur in application dealing with range images. ◮ Exponential and Gamma distributions are useful for modeling noise in relation to laser imaging. ◮ Impulse noise (salt and pepper) occur where we have quick transients (faulty switches, strong radiation). ◮ Uniform noise is sometimes used for theoretical studies. Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 15 / 31 Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 16 / 31
Spatial filtering for noise reduction, mean filters The geometric mean filter Unless the noise is periodic it is hard to do something in the frequency domain. There are other definitions of the mean that suite our purpose better than the arithmetic mean. This leaves us with spatial filtering. The geometric mean is defined as The simplest approach to noise reduction is to smooth the image by using an average filter of size m × n 1 mn 1 ˆ � f ( x , y ) = g ( s , t ) ˆ � f ( x , y ) = g ( s , t ) . mn ( s , t ) ∈ S xy ( s , t ) ∈ S xy Smooths in the same way as the arithmetic mean, but tend to This is also known as the Arithmetic mean . lose less details in the image. This will be quite effective to any noise with zero mean. The disadvantage is that sharp edges will be blurred. Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 17 / 31 Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 18 / 31 Harmonic means Order-statistic filters The harmonic mean is defined as 1 mn g ( s , t ) − 1 = ˆ � Recall that the response of a order statistic filters are based on f ( x , y ) = . mn − 1 1 � sorting the intensity values in a neighborhood S xy . ( s , t ) ∈ S xy g ( s , t ) ( s , t ) ∈ S xy The simplest versions are the min , median and max filters. Works well for Gaussian and salt noise, fails for pepper noise. There are also hybrid filters that combine sorting with averaging. The contraharmonic mean is defined as A midpoint filter is defined as ( s , t ) ∈ S xy g ( s , t ) Q + 1 � ˆ f ( x , y ) = f ( x , y ) = 1 � � ˆ ( s , t ) ∈ S xy g ( s , t ) Q � max ( g ( s , t )) + min ( g ( s , t ))) 2 ( s , t ) ∈ S xy ( s , t ) ∈ S xy Note that the contraharmonic mean reduces to the arithmetic This filter works best for Gaussian or uniform noise. mean for Q = 0 and the harmonic mean if Q = − 1 With positive values of Q it is well suited for pepper noise and with negative values it is well suited for salt noise Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 19 / 31 Niclas Börlin (CS, UmU) Image Restoration and Reconstruction February 3, 2009 20 / 31
Recommend










More recommend
Explore More Topics
Stay informed with curated content and fresh updates.