Point Location Lekcija 8 Sergio Cabello - PowerPoint PPT Presentation
Point Location Lekcija 8 Sergio Cabello sergio.cabello@fmf.uni-lj.si FMF Univerza v Ljubljani Edited from slides by Antoine Vigneron Sergio Cabello RC Point Location Outline a fundamental problem: point location solved using
Point Location Lekcija 8 Sergio Cabello sergio.cabello@fmf.uni-lj.si FMF Univerza v Ljubljani Edited from slides by Antoine Vigneron Sergio Cabello RC – Point Location
Outline ◮ a fundamental problem: point location ◮ solved using • trapezoidal map • RIC Sergio Cabello RC – Point Location
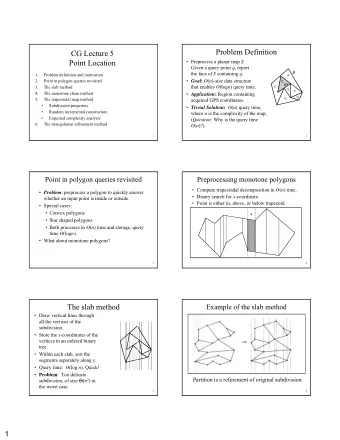
Problem statement ◮ given (a DCEL of) a Plane Straight Line Graph (PSLG) G , preprocess G to answer the following queries efficiently: • input: a query point q • output: the face of G that contains q ◮ remarks: one dimension in the plane sorting trapezoidal map searching point location quicksort RIC random BST history graph Sergio Cabello RC – Point Location
Results ◮ expected query time: O (log n ) ◮ expected preprocessing time: O ( n log n ) ◮ expected space usage: O ( n ) ◮ can we do better? • deterministic algorithm with same time and space bounds • we will see it next time (board) • optimal in a suitable model of computation Sergio Cabello RC – Point Location
Trapezoidal map ◮ start with a PSLG G ◮ the trapezoidal map T ( G ) is obtained by drawing vertical edges downward and upward from each vertex T ( G ) G ◮ we draw a bounding box around G so that there is no infinite face, hence all faces of T ( G ) trapezoids (or triangles) Sergio Cabello RC – Point Location
General position assumptions ◮ the PSLG G is a set S of non–intersecting line segments ◮ no two endpoints have same x –coordinate S T ( S ) ◮ for a general DCEL, simulate splitting at each vertex Sergio Cabello RC – Point Location
Consequences ◮ each trapezoid ∆ of T ( S ) depends on • a bottom segment bottom (∆) • a top segment top (∆) • a left endpoint left (∆) • a right endpoint right (∆) top (∆) top (∆ ′ ) right (∆ ′ ) right (∆) left (∆) ∆ ∆ ′ left (∆ ′ ) bottom (∆) bottom (∆ ′ ) Sergio Cabello RC – Point Location
Neighbors ◮ two trapezoids are neighbors if and only if they share a vertical edge ◮ by our general position assumption, a trapezoid has at most 4 neighbors Sergio Cabello RC – Point Location
Data structure ◮ Augment a DCEL with extra information ◮ or simpler: just store adjacency relations from previous two slides • the endpoints of the segments in S are represented by their coordinates • the segments in S are represented by their left and right endpoints • each trapezoid ∆ of T ( S ) has pointers to ⋆ bottom (∆), top (∆) ⋆ left (∆), right (∆) ⋆ its (at most) 4 neighbors Sergio Cabello RC – Point Location
Trapezoidal map ◮ T ( G ) has • O ( n ) vertices • O ( n ) edges • O ( n ) faces (=trapezoids) ◮ we use T ( G ) for point location ◮ point location in a trapezoidal map • construct trapezoidal map by RIC • use history graph to perform point location Sergio Cabello RC – Point Location
Point location in a PSLG G ◮ first compute T ( G ) and associated search structure by RIC ◮ then augment with pointers from each face of T ( G ) to the face in G that contains it • use the edges bottom (∆) to identify the face of G that contains it ◮ perform point location in T ( G ) ◮ find the corresponding face in G Sergio Cabello RC – Point Location
RIC trapezoidal maps Sergio Cabello RC – Point Location
Preliminaries ◮ compute a random permutation ( s 1 , s 2 , . . . s n ) of S ◮ we denote S i = { s 1 , s 2 . . . s i } for all i ≤ n ◮ initialize the data structure: DCEL or adjacency relations for the bounding box ◮ each trapezoid ∆ stores a conflict list: list of segments whose left endpoint is in ∆ • initially, only one conflict list (for the interior face of the bounding box) that gathers all the segments in S • keep a pointer from each s ∈ S to its conflicting trapezoid, which is the interior face of the bounding box Sergio Cabello RC – Point Location
Conflict lists: example s 4 s 1 s 3 s 6 s 5 ∆ ′ s 2 ∆ s 7 s 8 ∆ ′′ ◮ L (∆) = { s 5 , s 8 } ◮ L (∆ ′ ) = { s 6 } ◮ L (∆ ′′ ) = { s 7 } Sergio Cabello RC – Point Location
Idea ◮ at step i we maintain: • a representation of T ( S i ) • for each trapezoid ∆ of T ( S i ) ⋆ a conflict list L (∆) of pointers to all the segments in S \ S i whose left endpoint is in ∆ • for each s ∈ S \ S i ⋆ a pointer to the trapezoid ∆ of T ( S i ) that contains its left endpoint ◮ then we insert s i +1 and update this data structure Sergio Cabello RC – Point Location
Inserting s i ◮ s i may cross several trapezoids of T ( S i − 1 ) ◮ each trapezoid is split into at most 4 trapezoids ◮ some trapezoids have to be merged s i Sergio Cabello RC – Point Location
Inserting s i ◮ s i may cross several trapezoids of T ( S i − 1 ) ◮ each trapezoid is split into at most 4 trapezoids ◮ some trapezoids have to be merged s i Sergio Cabello RC – Point Location
Inserting s i ◮ s i may cross several trapezoids of T ( S i − 1 ) ◮ each trapezoid is split into at most 4 trapezoids ◮ some trapezoids have to be merged s i Sergio Cabello RC – Point Location
Zone of s i ◮ The zone of s i in T ( S i − 1 ) is the union of all the cells that intersect s i . s i ◮ It is the union of all the trapezoids of T ( S i − 1 ) that are destroyed when we insert s i Sergio Cabello RC – Point Location
Zone of s i ◮ It is the union of all the trapezoids in T ( S i ) that depend on s i . s i ◮ It is the union of all the trapezoids created when we insert s i Sergio Cabello RC – Point Location
Updating the trapezoidal map ◮ we know which trapezoid in T ( S i − 1 ) contains the left endpoint of s i : this is the trapezoid that conflicts with s i ◮ we proceed from left to right and update the trapezoidal map ◮ everything is done within the zone of s i ◮ we sweep from left to right ◮ only two trapezoids intersect the sweep line at any time ◮ let k i be the number of trapezoids in T ( S i ) that depend on s i ◮ there are at most k i events ◮ so the update can be done in O ( k i ) time Sergio Cabello RC – Point Location
Updating the conflict information ◮ we also need to update the conflict lists ◮ non–inserted left endpoints move from destroyed trapezoids to newly created trapezoids ◮ each destroyed trapezoid is contained in the union of 4 new trapezoids ◮ so update can be done in time O ( X i ), where X i is the number of left endpoints of non–inserted segments in the zone of s i ◮ X i is also the number of left endpoints in the trapezoids of T ( S i ) that depend on s i Sergio Cabello RC – Point Location
Estimation of E [ k i ] ◮ trapezoid ∆ ∈ T ( S i ) is a newly created trapezoid iff it depends on s i ◮ ∀ s ∈ S i let • δ (∆ , s ) = 1 if ∆ depends on s • δ (∆ , s ) = 0 otherwise ◮ the number of trapezoids that depend on s is � δ (∆ , s ) ∆ ∈T ( S i ) Sergio Cabello RC – Point Location
Estimation of E [ k i ] ◮ we use backward analysis ◮ we assume that S i is fixed ◮ then s i can be any segment in S i with probability 1 / i ◮ then E [ k i ] = 1 � � δ (∆ , s ) i s ∈ S i ∆ ∈T ( S i ) ◮ we reverse the order of summation: E [ k i ] = 1 � � δ (∆ , s ) i s ∈ S i ∆ ∈T ( S i ) Sergio Cabello RC – Point Location
Estimation of E [ k i ] ◮ What is: � δ (∆ , s ) s ∈ S i ◮ this is the number of segments that ∆ depends on ◮ so it is at most 4 ◮ therefore E [ k i ] ≤ 1 � 4 i ∆ ∈T ( S i ) ◮ there are O ( i ) trapezoids in T ( S i ) so E [ k i ] = 1 i O ( i ) = O (1) Sergio Cabello RC – Point Location
Estimation of X i ◮ we also need to estimate X i : number of non–inserted left endpoints in zone of s i ◮ backward analysis: S i is fixed ◮ let s ∈ S \ S i ◮ let ∆ s be the trapezoid in T ( S i ) that contains the left endpoint of segment s ◮ What is the probability that ∆ s is newly created? • this is the probability that s i is one of the (at most 4) segments ∆ s depends on • so it is at most 4 / i ◮ so E [ X i ] ≤ 4( n − i ) i Sergio Cabello RC – Point Location
Analysis ◮ let T ( n ) be the construction time ◮ then by linearity of expectation � n � � E [ T ( n )] = O E [ k i ] + E [ X i ] i =1 ◮ so � n � � n � 1 + n 1 � � E [ T ( n )] = O = O = O ( n log n ) n i i i =1 i =1 ◮ this is an expected time on worst case input Sergio Cabello RC – Point Location
Point location data structure Sergio Cabello RC – Point Location
Preliminaries ◮ the history graph records the history of the RIC ◮ Similar as we did for modified Quicksort: • Quicksort ⇒ history graph ⇒ searching ◮ here: • RIC ⇒ history graph ⇒ point location ◮ for Quicksort, history graph was a tree • here it is a DAG: Directed Acyclic Graph ◮ expected preprocessing time: O ( n log n ) ◮ expected space usage: O ( n ) ◮ expected query time: O (log n ) Sergio Cabello RC – Point Location
Example (1) B s 1 B ′ A ′ A ′ A B B ′ A (The root corresponds to the bounding box) Trapezoidal map History graph Sergio Cabello RC – Point Location
Example (2) B s 1 B ′ A ′ A B A ′ B ′ A A ′ and B ′ are deleted from the trapezoidal map s 2 but remain in the history graph Trapezoidal map History graph Sergio Cabello RC – Point Location
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.