Problem Definition Problem Definition CG Lecture 5 CG Lecture 5 - PDF document
Problem Definition Problem Definition CG Lecture 5 CG Lecture 5 Point Location Point Location Preprocess a planar map S. Given a query point q , report the face of S containing q. S 1. Problem definition and motivation A Goal : O (
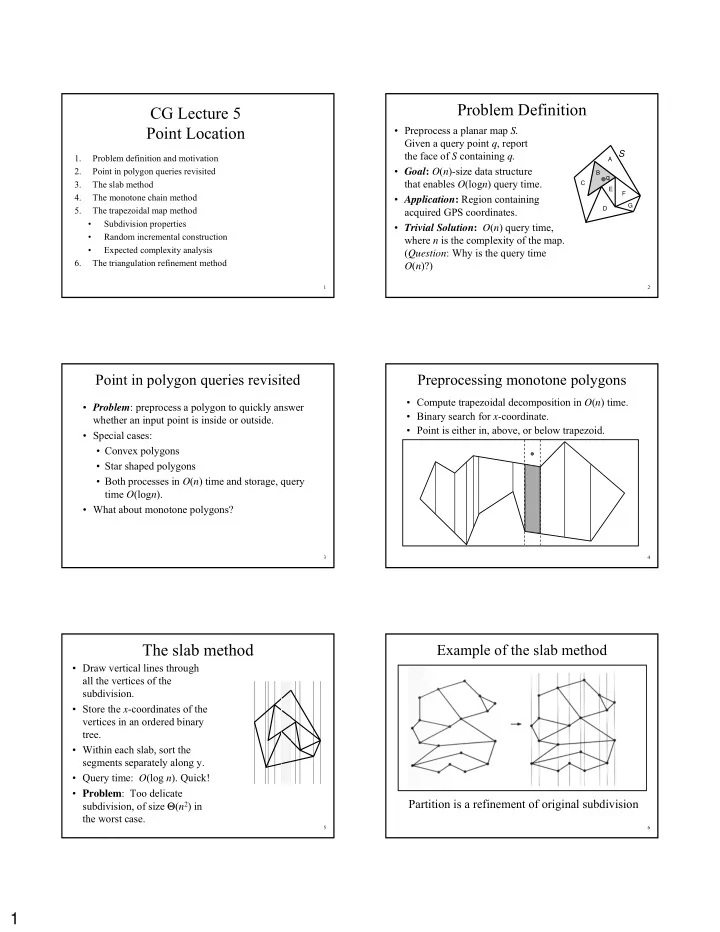
Problem Definition Problem Definition CG Lecture 5 CG Lecture 5 Point Location Point Location • Preprocess a planar map S. Given a query point q , report the face of S containing q. S 1. Problem definition and motivation A • Goal : O ( n )-size data structure 2. Point in polygon queries revisited B q that enables O (log n ) query time. 3. The slab method C E F 4. The monotone chain method • Application : Region containing G 5. The trapezoidal map method acquired GPS coordinates. D • Subdivision properties • Trivial Solution : O ( n ) query time, • Random incremental construction where n is the complexity of the map. • Expected complexity analysis ( Question : Why is the query time 6. The triangulation refinement method O ( n )?) 1 2 Point in polygon queries revisited Preprocessing monotone polygons Point in polygon queries revisited Preprocessing monotone polygons • Compute trapezoidal decomposition in O ( n ) time. • Problem : preprocess a polygon to quickly answer • Binary search for x -coordinate. whether an input point is inside or outside. • Point is either in, above, or below trapezoid. • Special cases: • Convex polygons • Star shaped polygons • Both processes in O ( n ) time and storage, query time O (log n ). • What about monotone polygons? 3 4 The slab method The slab method Example of the slab method Example of the slab method • Draw vertical lines through all the vertices of the subdivision. • Store the x -coordinates of the vertices in an ordered binary tree. • Within each slab, sort the segments separately along y. • Query time: O (log n ). Quick! • Problem : Too delicate Partition is a refinement of original subdivision Partition is a refinement of original subdivision subdivision, of size Θ ( n 2 ) in the worst case. 5 6 1
The monotone chain method The monotone chain method Discriminating against chains Discriminating against chains • Complete each chain with horizontal segments to • Motivation: keep simple query algorithm of slab infinity. method while decreasing storage to O ( n ). • Binary search for x -coordinate, and discriminate. • The idea: • A binary search is based on the ability to discriminate our query against the data. • Construct a subdivision that allows discrimination of the query point against it. • A point is discriminated against a monotone chain of p vertices in O ( p ) time. • Construct a monotone complete set of chains . 7 8 Monotone complete set of chains Point location in monotone chains Monotone complete set of chains Point location in monotone chains • Let G be a planer subdivision given by a planar • Apply the bisection principle (binary search) to S : straight line graph (PSLG). • Search primitive is a point-chain discrimination: • Let S = { C 1 , C 2 ,…, C r } be a set of chains which are • If point lies above current chain, search rest of monotone with respect to the same line L . chains above current, otherwise search chains • We call S a monotone complete set of chains for G below. if the following properties hold: • Each discrimination costs O (log p ) if p is the • Property 1 : the union of members of S contains G . length of longest chain. • Property 2 : For any two chains C i and C j of S , the • If there are r chains, then total cost for search is vertices of C i which are not vertices of C j lie on O (log r *log p ). the same side of C j . • Worst case is O (log 2 n ). 9 10 Regular graphs Regular graphs Example: regular graphs Example: regular graphs • Question : can we find a monotone complete set of chains for any planar graph G ? • Answer : no, only for regular graphs. • Definition : Let { v 1 ,…, v n } be the vertices of G , sorted such that i < j iff either v iy < v jy or v iy = v jy and v ix > v jx . A vertex v j is regular if there are integers i < j < k such that ( v i , v j ) and ( v j , v k ) are edges of G . Graph G is regular if each v j is regular, 1 < j < n . • Theorem 1 : a regular graph admits a complete set of chains monotone with respect to the y -direction. 11 12 2
Proof of theorem, part I Proof of theorem, part I Proof of theorem, part II Proof of theorem, part II • Imagine edge ( v i ,v j ) is directed from v i to v j if i < j . • To complete proof, the set of chains must meet the following conditions: • Define In( v j ) and Out( v j ) to be the set of incoming and outgoing edges, respectively. 1. Each edge has positive weight. 2. For each v j (j ≠ 1,n): W in ( v j ) = W out ( v j ). • Lemma : for any v j ( j > 1) we can construct a y - monotone chain from v 1 to v j . • Condition 1 ensures property 1. • Proof : by induction on j . • Condition 2 ensures we can choose the chain so • Define the weight of edge e , W ( e ), to be number of that they do not cross at v j (property 2). chains to which e belongs. • Weight-Balancing-Regular-Graph algorithm: • Define incoming and outgoing weights of vertex v, classical flow problem, solved by two passes on W in (v) and W out (v), to be sum of incoming and G (forward and backward passes). outgoing edge weights. • Forward pass makes outgoing flow equal to incoming, backward pass does the opposite. 13 14 Weight balancing example Total order on chains Weight balancing example Total order on chains 1 C 1 1 1 2 1 C 4 C 4 1 3 1 1 2 C 2 C 6 1 C C 2 6 1 1 C 2 1 2 1 1 C 1 C 3 C C C 5 C 1 C 3 1 3 5 3 C 4 4 C 5 5 1 1 1 3 C 6 6 15 16 Regularizing a planar map graph Regularizing a planar map graph Algorithm complexity Algorithm complexity • Sweepline from top to bottom. • In the worst case, the graph results in n /2 chains, each with n /2 vertices. • Events: vertices of graph. • Query in this graph is O (log 2 n ). • Status: balanced tree on edges intersecting sweepline, plus pointer to helper vertex for each • Storage seems to be O( n 2 )! interval in tree (vertex with lowest y -coordinate • Edges shared by several chains have one above interval). representative in search tree, which is the ancestor • Sweep maintains status structure, identifies non- of all other edges. regular vertices, and connects them to helper • Store chains using ‘bypass pointers’. vertex of interval. • Theorem : Point location in n-vertex planar • Two passes, adding upward and downward edges. subdivision can be effected in O (log 2 n ) time using • Complexity: O ( n ) space and O ( n log n ) time. O ( n ) storage and O( n log n ) preprocessing time. 17 18 3
The trapezoidal map The trapezoidal map Properties Properties • Also known as a vertical decomposition. • Construct a bounding box. • Assume general position: unique x -coordinates. • Extend upward and downward the vertical line • Contains triangles and trapezoids. from each vertex until it • Each trapezoid or triangle is determined: touches another segment. • By two vertices that define vertical sides, and • This works also for non- • By two segments that define nonvertical sides. crossing line segments . • A refinement of the original subdivision. 19 20 Notation Another trapezoidal map Notation Another trapezoidal map • Every trapezoid (triangle) ∆ is defined by � top ( ∆ ): a segment. � bottom ( ∆ ): a segment. � leftp ( ∆ ): a segment endpoint (right or left). � rightp ( ∆ ): a segment endpoint (right or left). • Five cases for left (right) sides of trapezoid. 21 22 ( ∆ ∆ ) Five cases for left leftp ) Complexity Five cases for left leftp ( Complexity • Theorem (linear complexity) : A trapezoidal map of n segments contains at most 6 n +4 vertices and at most 3 n +1 faces. • Proof: Vertices: 2 n + 2(2 n) + 4 = 6 n + 4 ↑ ↑ ↑ ↑ ↑ ↑ original extensions box original extensions box • Case number five involves the bounding rectangle Faces: Count leftp ( ∆ ). R , where leftp is the lower left corner of R . 2 n + n + 1 = 3 n + 1 ↑ ↑ ↑ ↑ ↑ ↑ left e.p left e.p. right . right e.p e.p. box . box 23 24 4
Recommend












More recommend
Explore More Topics
Stay informed with curated content and fresh updates.