Overview of Line Search Topics Problem Definition Problem - PowerPoint PPT Presentation
Overview of Line Search Topics Problem Definition Problem definition f ( ) Line search algorithms Uniform search Dichotomous search The line search problem: find a scalar R 1 such that Golden section search
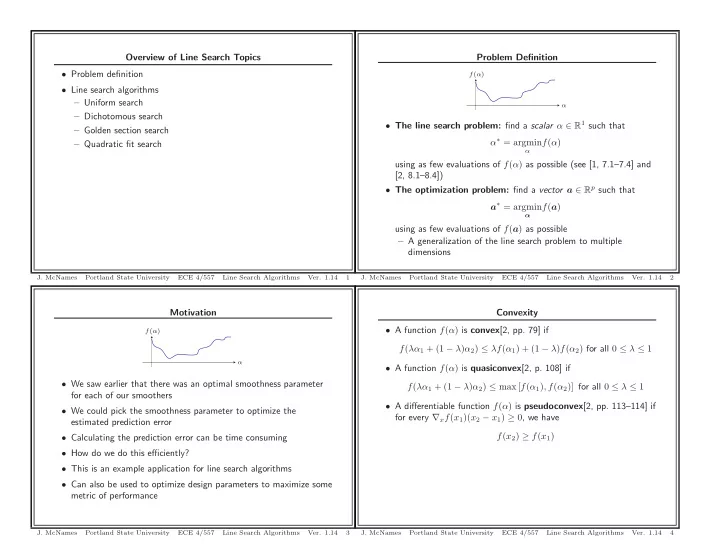
Overview of Line Search Topics Problem Definition • Problem definition f ( α ) • Line search algorithms – Uniform search α – Dichotomous search • The line search problem: find a scalar α ∈ R 1 such that – Golden section search α ∗ = argmin f ( α ) – Quadratic fit search α using as few evaluations of f ( α ) as possible (see [1, 7.1–7.4] and [2, 8.1–8.4]) • The optimization problem: find a vector a ∈ R p such that a ∗ = argmin f ( a ) α using as few evaluations of f ( a ) as possible – A generalization of the line search problem to multiple dimensions J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 1 J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 2 Motivation Convexity • A function f ( α ) is convex [2, pp. 79] if f ( α ) f ( λα 1 + (1 − λ ) α 2 ) ≤ λf ( α 1 ) + (1 − λ ) f ( α 2 ) for all 0 ≤ λ ≤ 1 α • A function f ( α ) is quasiconvex [2, p. 108] if • We saw earlier that there was an optimal smoothness parameter f ( λα 1 + (1 − λ ) α 2 ) ≤ max [ f ( α 1 ) , f ( α 2 )] for all 0 ≤ λ ≤ 1 for each of our smoothers • A differentiable function f ( α ) is pseudoconvex [2, pp. 113–114] if • We could pick the smoothness parameter to optimize the for every ∇ x f ( x 1 )( x 2 − x 1 ) ≥ 0 , we have estimated prediction error f ( x 2 ) ≥ f ( x 1 ) • Calculating the prediction error can be time consuming • How do we do this efficiently? • This is an example application for line search algorithms • Can also be used to optimize design parameters to maximize some metric of performance J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 3 J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 4
Goal Interval Bounding Problem f ( α ) f ( α ) α α • There is no line search algorithm that is guaranteed to find the • Many line search algorithms try to find a local minimum in the range [0 , ∞ ] as quickly as possible global minimum for any function f ( α ) • If the criteria contains multiple local minima, they find one of • All of the line search algorithms try to find a possibly local them quickly minimum as quickly as possible • Otherwise they find the global minima • They are designed with functions with some type of convexity in mind • Most of these algorithms require that the minima be constrained to a finite range: α ∗ ∈ [ α min , α max ] • Work with non-convex functions, but very few compare or try to find the deepest local minimum • By the nature of the problem, the lower limit is usually known to be zero: α min = 0 • Many heuristic techniques for searching for the global minimum, but none provide any guarantees or any claims of optimality • Often the upper limit has to be found J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 5 J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 6 Interval Bounding Algorithm Example 1: Interval Bounding This is one popular algorithm for finding the upper limit for a line 1 search algorithm. The user specifies the initial step α 1 and picks the expansion rate c . 0.8 • Evaluate the function at α 0 = 0 • Evaluate the function at α 1 0 0.6 • Evaluate the function at α 2 = α 1 × c f ( α ) • k = 1 4 0.4 • Until f ( α k − 1 ) > f ( α k ) and f ( α k ) < f ( α k +1 ) 1 – k := k + 1 2 3 0.2 – α k +1 := α k × c • There is a minimum between α k − 1 and α k +1 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Note that this algorithm may also increase the lower bound from its α initial value of 0. J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 7 J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 8
Example 1: MATLAB Code for c1 = 1: length(x), h = text(x(c1 )+0.01 ,LSFn(x(c1)), num2str(c1 -1)); set(h,’HorizontalAlignment ’,’Left ’); set(h,’VerticalAlignment ’,’Middle ’); end function [] = IntervalBound ; box off; FigureLatex; st = 2; % Step size xlabel(’ α ’); x = zeros (100 ,1); ylabel(’ f ( α ) ’); x(1) = 0; AxisSet (8); x(2) = 0.1; % First step x(3) = x(2)* st; print -depsc IntervalBound ; cnt = 3; while ¬ (LSFn(x(cnt -2)) > LSFn(x(cnt -1)) & LSFn(x(cnt -1)) < LSFn(x(cnt ))) cnt = cnt + 1; x(cnt) = x(cnt -1)* st; end x = x(1: cnt ); x0 = x(cnt -2); x1 = x(cnt ); figure; FigureSet (1,’Slides ’); u = 0:0 .01 :1; h = patch ([x0 x1 x1 x0],[0 0 1 1],’k’); set(h,’LineStyle ’,’None ’); set(h,’FaceColor ’,0.8 *[1 1 1]); % Light gray region hold on; h = plot(u,LSFn(u),’r’,x,LSFn(x),’.’); set(h(2),’MarkerSize ’ ,8); set(h,’LineWidth ’,1.2); hold off; J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 9 J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 10 Bounding the Line Search Interval Uniform Search More generally, the line search interval can be found by “interval f ( α ) doubling”. Assume that α is constrained to being a positive number. 1. Pick initial values of α min α 2. While f ( α min ) < f ( α max ) , α min = α min /c • Pick the search points α 1 , α 2 , . . . , α n so that they are uniformly 3. While f ( α min ) > f ( α max ) , α max = α max × c spaced over some preset range Typically c = 2 , but any c > 1 could be used. • Then pick the best α α ∗ = argmin α ∈{ a 1 ,a 2 ,...,a n } f ( α ) + No assumptions about convexity or shape of f ( α ) + Finds (nearly) a global minimum − Relatively inefficient J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 11 J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 12
Example 2: Uniform Search Example 2: MATLAB Code Resolution:0.2222 1 function [] = UniformSearch ; ll = 0; % Lower limit ul = 1; % Upper limit np = 10; % No. of points 0.8 x = ll:(ul -ll)/(np -1): ul; f = LSFn(x); xrng = (ul -ll )/(np -1); 0.6 [fmin ,id] = min(f); f ( α ) xmin = x(id); figure; 0.4 FigureSet (1,’Slides ’); u = 0:0 .01 :1; h = plot(u,LSFn(u),’r’,x,f,’.’,xmin ,fmin ,’g.’); set(h(2),’MarkerSize ’ ,8); set(h,’LineWidth ’,1.2); 0.2 set(h(3),’MarkerSize ’ ,15); box off; st = sprintf(’Resolution :%6 .4f ’ ,2*min(diff(x))); title(st); FigureLatex; 0 xlabel(’ α ’); 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 ylabel(’ f ( α ) ’); α AxisSet (8); print -depsc UniformSearch ; J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 13 J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 14 Dichotomous Search Example 3: Dichotomous Search • Suppose you know that α is in the range of α min to α max Resolution:0.0332 1. Calculate the following evaluation points 1 b = α min + α max c = α min + α max − ǫ + ǫ 2 2 0.8 2. If f ( b ) < f ( c ) , set α max = c Otherwise, set α min = b 0.6 3. Repeat until convergence f ( α ) • If the derivative d f ( α ) can be calculated, the computation can be 0.4 d α reduced to one evaluation of the derivative per an iteration 5 3 7 9 • If the derivative is used, this is called the bisection method 0.2 − Converges to a local minimum (global if f ( α ) is quasiconvex) 1 + Faster than a uniform search 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 α J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 15 J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 16
Example 3: Dichotomous Error Example 3: MATLAB Code 0.25 function [] = DichotomousSearch ; clear all; close all; 0.2 ll = 0; % Lower limit ul = 1; % Upper limit np = 10; % No. of points eta = 0.001; % Dither 0.15 f ( α i ) cnt = 0; x = zeros(np ,1); f = zeros(np ,1); 0.1 for c1 = 1:np/2, mp = (ul+ll )/2; b = mp -eta; fb = LSFn(b); c = mp+eta; fc = LSFn(c); if fb <fc , 0.05 ul = c; else ll = b; end; 0 cnt = cnt + 1; 1 2 3 4 5 6 7 8 9 10 x(cnt) = b; f(cnt) = fb; Iteration cnt = cnt + 1; x(cnt) = c; f(cnt) = fc; end; J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 17 J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 18 [fmin ,id] = min(f); xlim ([0 .5 length(f)+0 .5 ]); xmin = x(id); ylim ([0 1.05*max(f)]); xrng = ul -ll; FigureLatex; ylabel(’ f ( αk ) ’); figure; xlabel(’Iteration (k)’); FigureSet (1,’Slides ’); box off; u = 0:0 .01 :1; AxisSet (8); h = plot(u,LSFn(u),’r’,x,f,’.’,xmin ,fmin ,’g.’); print -depsc DichotomousError; set(h(2),’MarkerSize ’ ,8); set(h,’LineWidth ’,1.2); set(h(3),’MarkerSize ’ ,15); for c1 = 1:2: length(x), h = text(x(c1),f(c1 )+0.01 ,num2str(c1 )); set(h,’HorizontalAlignment ’,’Center ’); set(h,’VerticalAlignment ’,’Bottom ’); end; FigureLatex; xlabel(’ α ’); ylabel(’ f ( α ) ’); st = sprintf(’Resolution :%6 .4f\n’,xrng ); title(st); box off; AxisSet (8); print -depsc DichotomousSearch ; figure; FigureSet (2,’Slides ’); k = 1: length(f); u = 0:0 .01 :1; h = stem(k,f,’r’); set(h,’MarkerFaceColor ’,’r’); J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 19 J. McNames Portland State University ECE 4/557 Line Search Algorithms Ver. 1.14 20
Recommend














More recommend
Explore More Topics
Stay informed with curated content and fresh updates.