Parameter estimation in regularization models for Poisson data L. - PowerPoint PPT Presentation
Parameter estimation in regularization models for Poisson data L. Zanni Department of Physics, Computer Science and Mathematics, University of Modena and Reggio Emilia, Italy First French-German Mathematical Image Analysis Conference Paris, 13
Parameter estimation in regularization models for Poisson data L. Zanni Department of Physics, Computer Science and Mathematics, University of Modena and Reggio Emilia, Italy First French-German Mathematical Image Analysis Conference Paris, 13 - 15 January 2014 Joint work with: M. Bertero , University of Genova, Italy V. Ruggiero , University of Ferrara, Italy L. Zanni Parameter estimation in regularization models for Poisson data Paris, 13-15 January 2014 1 / 49
Outline Poisson data and the MAP optimization problem 1 Regularization parameter estimation 2 A possible discrepancy principle Solving the discrepancy equation 3 Gradient-based methods for differentiable problems Updating the steplength parameter Updating the scaling matrix Secant-based root finding solver Solving a constrained model 4 ADMM as optimization solver Numerical considerations 5 Conclusions 6 L. Zanni Parameter estimation in regularization models for Poisson data Paris, 13-15 January 2014 2 / 49
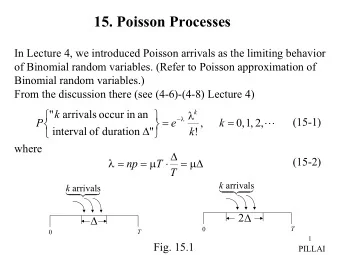
Poisson data ➤ Consider imaging processes where image intensity is measured via the counting of incident particles ➤ Fluctuations in the emission-counting process can be described by modeling the data as realizations of Poisson random variables ➤ The probability of receiving n particles is given by p ( n ) = e − λ λ n , n = 0 , 1 , 2 , . . . n ! where λ is the expected value of the counts ➤ A statistical model appropriate for describing data in different imaging applications ( emission tomography, fluorescence microscopy, optical/infrared astronomy, etc. ) L. Zanni Parameter estimation in regularization models for Poisson data Paris, 13-15 January 2014 3 / 49
Poisson noisy image restoration: problem setting ➤ x ∗ ∈ R n − → the unknown true image; x ∗ i ≥ 0 ➤ A ∈ R n × n − → the imaging matrix representing the blurring phenomenon ( A = I in denoising) ➤ b ∈ R − → the nonnegative background radiation ➤ ( A x ∗ + b ) − → the image that would be recorded in absence of noise ➤ y ∈ R n − → the observed blurred noisy image; y i ≥ 0 ➩ Given A, b, y , determine an estimate of the true image x ∗ L. Zanni Parameter estimation in regularization models for Poisson data Paris, 13-15 January 2014 4 / 49
Poisson noisy image restoration: the optimization problem Following the maximum a posteriori (MAP) approach, an estimate x ∗ β of the unknown image can be obtained by solving The MAP constrained optimization problem min x ≥ 0 f 0 ( x ) + βf 1 ( x ) , β > 0 f 0 ( x ) data-fidelity function (generalized Kullback-Leibler divergence) n � y i � � f 0 ( x ) = D KL ( y , x ) = y i log + ( A x + b ) i − y i ( A x + b ) i i =1 f 1 ( x ) = f ( L x ) regularization term ( L linear operator) f 1 ( x ) = 1 2 � x � 2 2 , f 1 ( x ) = � x � 1 , f 1 ( x ) = �|∇ x |� 1 β is the regularization parameter L. Zanni Parameter estimation in regularization models for Poisson data Paris, 13-15 January 2014 5 / 49
Regularization parameter estimation ➤ Look for estimations of a regularization parameter β suitable for balancing the data fidelity with the regularity of the solution [Engl-Hanke-Neubauer,1996], [Bertero-Boccacci,1998] ➤ Focus on ideas based on the discrepancy principle: a suitable β is such that a measure of the discrepancy D y ( β ) between the corrupted data y and the reconstruction x ∗ β equals some known error τ : D y ( β ) = τ ➤ We consider n � � y i � D y ( β ) = D KL ( y , x ∗ + ( A x ∗ β ) = y i log β + b ) i − y i ( A x ∗ β + b ) i i =1 A i,j ≥ 0 , � � ∀ i, j, i A i,j = 1 , j A i,j > 0 , b > 0 [Bardsley-Goldes,2009], [Bertero et al., 2010], [Carlavan, Blanc-F´ eraud, 2011,2012], [Teuber-Steidl-Chan, 2013] L. Zanni Parameter estimation in regularization models for Poisson data Paris, 13-15 January 2014 6 / 49
Following the discrepancy principle: what is necessary? n � � y i � + ( A x ∗ D y ( β ) = y i log β + b ) i − y i = τ ( A x ∗ β + b ) i i =1 ➤ Find a suitable value for the constant τ , given the Poisson data assumption and the above discrepancy function. ➤ Exploit effective algorithms for finding β such that D y ( β ) = τ . Alternative approaches: Determine β by solving directly the nonlinear equation [Zanella-Boccacci-Z.-Bertero 2009], [Bertero et al., 2010] Determine β by solving the constrained minimization problem � � min f 1 ( x ) sub. to D y ( β ) ≤ τ x ≥ 0 [Carlavan, Blanc-F´ eraud, 2011,2012], [Teuber-Steidl-Chan, 2013] L. Zanni Parameter estimation in regularization models for Poisson data Paris, 13-15 January 2014 7 / 49
A possible setting for the constant τ Lemma ( [Zanella et al., Inverse Problems 2009, 2013] ) Let Y λ be a Poisson r.v. with expected value λ and consider � � Y λ � � F ( Y λ ) = 2 Y λ ln + λ − Y λ . λ Then the expected value of F ( Y λ ) satisfies � 1 � E { F ( Y λ ) } = 1 + O , λ → + ∞ . λ The asymptotic estimate of the expected value of D y ( β ) is n 2 . Then τ = n 2 eraud, IEEE T. Image Proc. 2011] τ = m 2 , m = # { y i , y i > 0 } In [Carlavan, Blanc-F´ L. Zanni Parameter estimation in regularization models for Poisson data Paris, 13-15 January 2014 8 / 49
Find ¯ β such that D y (¯ β ) = τ Consider the nonlinear equation n � � y i � + ( A x ∗ D y ( β ) − τ = y i log β + b ) i − y i − τ = 0 ( A x ∗ β + b ) i i =1 where x ∗ β = argmin f β ( x ) = f 0 ( x ) + βf 1 ( x ) x ≥ 0 and f 0 ( x ) is nonnegative, convex and coercive on R n ≥ 0 . Assume f 1 ( x ) differentiable, nonnegative, convex and such that ∇ 2 f 0 ( x ) ∇ 2 f 1 ( x ) � � � � N ∩ N = { 0 } ➩ f β ( x ) is coercive and strictly convex ⇒ D y ( β ) is well-defined if ¯ D y ( β ) is an increasing function of β ⇒ β exists, it is unique L. Zanni Parameter estimation in regularization models for Poisson data Paris, 13-15 January 2014 9 / 49
Look at an example: edge preserving regularization n � � f 1 ( x ) = ∆ k k =1 ∆ k = ( x i +1 ,j − x i,j ) 2 + ( x i,j +1 − x i,j ) 2 + δ 2 = � L k x � 2 + δ 2 � � 1 n ] T , L = [ L T 1 , . . . , L T ( L k ) 2 × n , E ( x ) = diag ∆ k I 2 2 k =1 ,...,n � ∆ k A k xx T A T � 1 F ( x ) = diag I 2 − k k =1 ,...,n ∇ f 1 ( x ) = L T E ( x ) L x , ∇ 2 f 1 ( x ) = L T E ( x ) − 1 F ( x ) L , ➩ = { x ∈ R n | x = c 1 n , c ∈ R n } ∇ 2 f 1 ( x ) N � � L. Zanni Parameter estimation in regularization models for Poisson data Paris, 13-15 January 2014 10 / 49
Look at an example: edge preserving regularization Recall that n � y i � � f 0 ( x ) = y i log + ( A x + b ) i − y i ( A x + b ) i i =1 A i,j ≥ 0 , � � ∀ i, j, x ≥ 0 i A i,j = 1 , j A i,j > 0 , b > 0 , y y ∇ 2 f 0 ( x ) = A T ∇ f 0 ( x ) = 1 n − A T ( A x + b ) , ( A x + b ) 2 A = { x ∈ R n | ( A x ) i = 0 , i ∈ I 1 } , ∇ 2 f 0 ( x ) � � N I 1 = { i | y i > 0 } ➩ ∇ 2 f 0 ( x ) ∇ 2 f 1 ( x ) � � � � N ∩ N = { 0 } ➤ f β ( x ) is strictly convex and D y ( β ) is an increasing function of β L. Zanni Parameter estimation in regularization models for Poisson data Paris, 13-15 January 2014 11 / 49
Edge preserving regularization: existence of ¯ β such that D y (¯ β ) = τ √ ∆ k f 1 ( x ) = � n Let k =1 β = x ∗ , x ∗ = argmin β → 0 x ∗ (i) lim f 0 ( x ) x ∗ ≥ 0 j =1 ( A T y ) j > b 1 � n (ii) If then n n A i y i � � β →∞ x ∗ A i = lim β = ¯ c 1 n , ¯ c : c + b = n , A i,j A i ¯ i ∈I 1 j =1 ➩ j =1 ( A T y ) j > b , 1 � n f 0 ( x ∗ ) < n c 1 n ) > n If 2 , f 0 (¯ 2 , n β such that D y (¯ ¯ then β ) = τ exists and is unique y = 1 A i = 1 y − b , � (iii) If then c = ¯ ¯ ¯ i ∈I 1 y i n c 1 n ) > n 1 i ∈I 1 y i ln y i > 1 f 0 (¯ ⇔ � 2 + ¯ y ln¯ y 2 n L. Zanni Parameter estimation in regularization models for Poisson data Paris, 13-15 January 2014 12 / 49
Blurred images corrupted by Poisson noise: two test problems Test environment: Matlab 7.14.0 on a processor Intel Core i7 CPU Q720 1.60 GHz, 4GB RAM Test problems: Cameraman ( 256 × 256 ), Spacecraft ( 256 × 256 ) Original Image Observed Image L. Zanni Parameter estimation in regularization models for Poisson data Paris, 13-15 January 2014 13 / 49
Edge preserving regularization: cameraman test problem n = 256 2 , ¯ c = 1407 . 84 f 0 ( x ∗ ) = 16403 . 5 < 32768 = n 2 < 14879957 . 3 = f 0 (¯ c 1 n ) 0.5 0.4 0.3 0.2 Behaviour of 0.1 0 F( β ) F ( β ) = 2 −0.1 nD y ( β ) − 1 −0.2 −0.3 −0.4 −0.5 10 −10 10 −8 10 −6 10 −4 10 −2 β L. Zanni Parameter estimation in regularization models for Poisson data Paris, 13-15 January 2014 14 / 49
Edge preserving regularization: spacecraft test problem n = 256 2 , ¯ c = 154 . 22 f 0 ( x ∗ ) = 32399 . 6 < 32768 = n 2 < 8022676 . 7 = f 0 (¯ c 1 n ) 0.45 0.4 0.35 Behaviour of 0.3 0.25 F( β ) F ( β ) = 2 0.2 nD y ( β ) − 1 0.15 0.1 0.05 0 −0.05 10 −12 10 −10 10 −8 10 −6 10 −4 10 −2 β L. Zanni Parameter estimation in regularization models for Poisson data Paris, 13-15 January 2014 15 / 49
Recommend










More recommend
Explore More Topics
Stay informed with curated content and fresh updates.