MSc in Computer Engineering, Cybersecurity and Artificial - PowerPoint PPT Presentation
MSc in Computer Engineering, Cybersecurity and Artificial Intelligence Course FDE , a.a. 2019/2020, Lecture 13 State feedback control design by eigenvalue assignment Prof. Mauro Franceschelli Dept. of Electrical and Electronic Engineering
MSc in Computer Engineering, Cybersecurity and Artificial Intelligence Course FDE , a.a. 2019/2020, Lecture 13 State feedback control design by eigenvalue assignment Prof. Mauro Franceschelli Dept. of Electrical and Electronic Engineering University of Cagliari, Italy Monday, 27th April 2020 1 / 40
Outline Introduction A necessary and sufficient condition for state feedback design for arbitrary eigenvalue assignment Design procedure Design with reference input 2 / 40
Introduction Introduction Consider the next discrete time linear dynamical system: ① ( k + 1) = ❆① ( k ) + ❇✉ ( k ) ② ( k ) = ❈① ( k ) where ❆ is an n × n matrix; ❇ is an n × 1 matrix; ❈ is a 1 × n matrix; • Matlab Simulink block diagram (open-loop system dynamics): 3 / 40
Introduction Introduction We consider a discrete time linear model which could be: An intrinsic discrete-time system. Example: Dynamics of a bank savings account with fixed interest rates; A discretized linear system: A continuous-time linear system which is measured and actuated at a given sampling rate. Example: DC electric motor; An intrinsic discrete time nonlinear system linearized around an equilibrium/operating point. A continuous time nonlinear system linearized around an equilibrium/operating point and discretized. 4 / 40
Introduction Introduction We consider a discrete time linear model which could be: An intrinsic discrete-time system. Example: Dynamics of a bank savings account with fixed interest rates; A discretized linear system: A continuous-time linear system which is measured and actuated at a given sampling rate. Example: DC electric motor; An intrinsic discrete time nonlinear system linearized around an equilibrium/operating point. A continuous time nonlinear system linearized around an equilibrium/operating point and discretized. 4 / 40
Introduction Introduction We consider a discrete time linear model which could be: An intrinsic discrete-time system. Example: Dynamics of a bank savings account with fixed interest rates; A discretized linear system: A continuous-time linear system which is measured and actuated at a given sampling rate. Example: DC electric motor; An intrinsic discrete time nonlinear system linearized around an equilibrium/operating point. A continuous time nonlinear system linearized around an equilibrium/operating point and discretized. 4 / 40
Introduction Introduction We consider a discrete time linear model which could be: An intrinsic discrete-time system. Example: Dynamics of a bank savings account with fixed interest rates; A discretized linear system: A continuous-time linear system which is measured and actuated at a given sampling rate. Example: DC electric motor; An intrinsic discrete time nonlinear system linearized around an equilibrium/operating point. A continuous time nonlinear system linearized around an equilibrium/operating point and discretized. 4 / 40
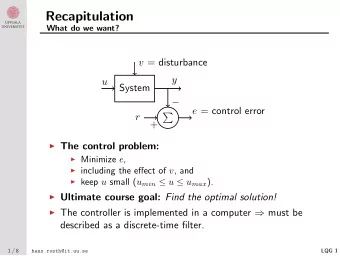
Introduction Assumptions and main objective • We now assume to have full access to the state of the system • In particular, all state variables are measured at discrete intervals of time • Our goal is to design a proportional, full state feedback control u ( k ) = − Kx ( k ) where K is a row-vector to modify the stability properties of the system (or just an equilibrium point if it is a linearized model) • The method allows to tailor the transient response of the system by assigning desired eigenvalues to the closed-loop system, i.e., assignment of desired time-constants to the modes of the system. • The method we are about to present can be easily generalized for multi-input/multi-output systems where K is, in general a r × n rectangular matrix 5 / 40
Introduction Assumptions and main objective • We now assume to have full access to the state of the system • In particular, all state variables are measured at discrete intervals of time • Our goal is to design a proportional, full state feedback control u ( k ) = − Kx ( k ) where K is a row-vector to modify the stability properties of the system (or just an equilibrium point if it is a linearized model) • The method allows to tailor the transient response of the system by assigning desired eigenvalues to the closed-loop system, i.e., assignment of desired time-constants to the modes of the system. • The method we are about to present can be easily generalized for multi-input/multi-output systems where K is, in general a r × n rectangular matrix 5 / 40
Introduction Assumptions and main objective • We now assume to have full access to the state of the system • In particular, all state variables are measured at discrete intervals of time • Our goal is to design a proportional, full state feedback control u ( k ) = − Kx ( k ) where K is a row-vector to modify the stability properties of the system (or just an equilibrium point if it is a linearized model) • The method allows to tailor the transient response of the system by assigning desired eigenvalues to the closed-loop system, i.e., assignment of desired time-constants to the modes of the system. • The method we are about to present can be easily generalized for multi-input/multi-output systems where K is, in general a r × n rectangular matrix 5 / 40
Introduction Assumptions and main objective • We now assume to have full access to the state of the system • In particular, all state variables are measured at discrete intervals of time • Our goal is to design a proportional, full state feedback control u ( k ) = − Kx ( k ) where K is a row-vector to modify the stability properties of the system (or just an equilibrium point if it is a linearized model) • The method allows to tailor the transient response of the system by assigning desired eigenvalues to the closed-loop system, i.e., assignment of desired time-constants to the modes of the system. • The method we are about to present can be easily generalized for multi-input/multi-output systems where K is, in general a r × n rectangular matrix 5 / 40
Introduction Assumptions and main objective • We now assume to have full access to the state of the system • In particular, all state variables are measured at discrete intervals of time • Our goal is to design a proportional, full state feedback control u ( k ) = − Kx ( k ) where K is a row-vector to modify the stability properties of the system (or just an equilibrium point if it is a linearized model) • The method allows to tailor the transient response of the system by assigning desired eigenvalues to the closed-loop system, i.e., assignment of desired time-constants to the modes of the system. • The method we are about to present can be easily generalized for multi-input/multi-output systems where K is, in general a r × n rectangular matrix 5 / 40
Introduction Introduction Graphical representation of the closed-loop system with full-state feedback control 6 / 40
Introduction Why proportional state feedback • Proportional feedback is a popular and robust control method, very simple to implement on embedded digital systems. • To control a dynamical system by digital means the main limiting factor is the sampling rate. • If the sampling rate is too high, i.e., the sampling interval is too short, then the embedded system might not be fast enough to perform analogue to digital conversion, process the signal by computing the control u ( k ) and convert back with digital to analogue conversion. 7 / 40
Introduction Why proportional state feedback • Proportional feedback is a popular and robust control method, very simple to implement on embedded digital systems. • To control a dynamical system by digital means the main limiting factor is the sampling rate. • If the sampling rate is too high, i.e., the sampling interval is too short, then the embedded system might not be fast enough to perform analogue to digital conversion, process the signal by computing the control u ( k ) and convert back with digital to analogue conversion. 7 / 40
Introduction Why proportional state feedback • Proportional feedback is a popular and robust control method, very simple to implement on embedded digital systems. • To control a dynamical system by digital means the main limiting factor is the sampling rate. • If the sampling rate is too high, i.e., the sampling interval is too short, then the embedded system might not be fast enough to perform analogue to digital conversion, process the signal by computing the control u ( k ) and convert back with digital to analogue conversion. 7 / 40
Outline Introduction A necessary and sufficient condition for full state feedback design for arbitrary eigenvalue assignment Design procedure Design with reference input 8 / 40
Full state feedback design State feedback design Consider the next discrete-time linear system: ① ( k + 1) = ❆① ( k ) + ❇✉ ( k ) (1) where ❆ is an n × n matrix; ❇ is an n × 1 matrix; • Let matrix A have spectrum σ ol = { λ 1 , λ 2 , . . . , λ n } 9 / 40
Full state feedback design State feedback design • Consider now a full-state feedback u ( k ) = − K ① ( k ) with K a 1 × n matrix (single input case). The dynamics of system (1) become ① ( k + 1) = ❆① ( k ) + ❇ u ( k ) = ❆① ( k ) + ❇ ( − K ① ( k )) = ( ❆ − ❇❑ ) ① ( k ) (2) • The state transition matrix is now ❆ − ❇❑ and has spectrum σ cl = { µ 1 , µ 2 , . . . , µ n } ⇒ state feedback changes the stability properties of a system. 10 / 40
Recommend

More recommend
Explore More Topics
Stay informed with curated content and fresh updates.