Fragility of controllers Robust and non-fragile control systems - PowerPoint PPT Presentation
5/16/2018 2 1 Fragility of controllers Robust and non-fragile control systems Robust and non-fragile control systems 5/7/2018 5/7/2018 Any controller should be able to tolerate some uncertainty in its coefficients (stability and
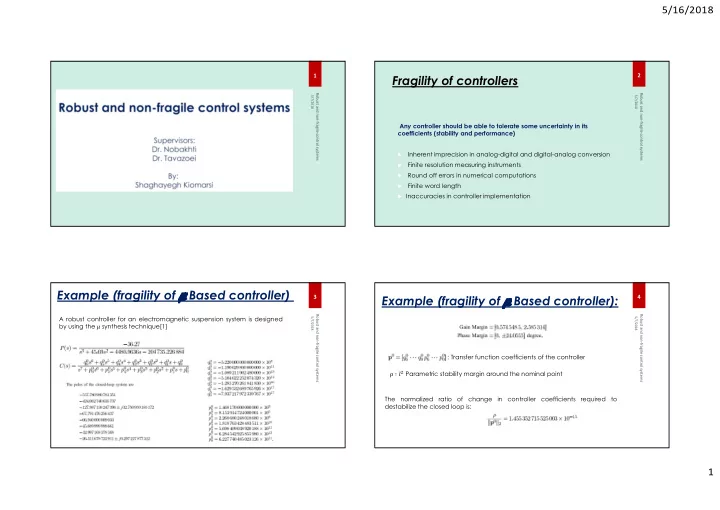
5/16/2018 2 1 Fragility of controllers Robust and non-fragile control systems Robust and non-fragile control systems 5/7/2018 5/7/2018 Any controller should be able to tolerate some uncertainty in its coefficients (stability and performance) Inherent imprecision in analog-digital and digital-analog conversion Finite resolution measuring instruments Round off errors in numerical computations Finite word length Inaccuracies in controller implementation Example (fragility of 𝜈 Based controller) Example (fragility of 𝜈 Based controller): 3 4 Robust and non-fragile control systems Robust and non-fragile control systems A robust controller for an electromagnetic suspension system is designed 5/7/2018 5/7/2018 by using the 𝜈 synthesis technique[1] : Transfer function coefficients of the controller ρ ∶ 𝑚 � Parametric stability margin around the nominal point The normalized ratio of change in controller coefficients required to destabilize the closed loop is: 1
5/16/2018 Non-fragile controller design based on Example results 5 6 centroid of admissible regions Robust and non-fragile control systems Robust and non-fragile control systems 5/7/2018 5/7/2018 In [1] optimum and robust controllers, designed by using the H2, H1, l1, and 𝜈 formulations, can produce extremely fragile controllers Being situated away from the boundaries of the stability region in the controller Badly chosen optimization criteria => controller parameters that are parameter space, controllers designed based on the centroid method are m mathematically ill-posed both robust and non-fragile. The stability regions in the parameter space of higher order systems have “ instability holes ” and the optimization algorithm can stuff the controller Non-fragility criterion=minimum distance to the boundary of stability region parameter into tight spots close to these holes Non-convex stability region: Finding the center of the largest convex region Good gain and phase margins are not necessarily reliable indicators of robustness. 𝟐 However, poor gain and/or phase margins are accurate indicators of Optimization problem : 𝒏𝒃𝒚 𝐧𝐛𝐲 (𝒔 ℂ ) = 𝒍 �(𝒜) � 𝑯 fragileness! Controller sensitivity which may be important in other non-optimal design Example[2]: IPDT process or a FOPDT techniques as well. Non-fragile PID controller in the viewpoint of the center of mass ~ Ziegler–Nichols Non-fragile controller design based on Non-fragile controller design based on 7 8 pole sensitivity minimization pole sensitivity minimization Robust and non-fragile control systems Robust and non-fragile control systems 5/7/2018 5/7/2018 A new measure: ► Controller fragility will depend upon the particular realization of the controller. ► Handles the fragility problem by minimization of the eigenvalue sensitivity to The measure is a weighted sum of a 2-norm of the sensitivity of the individual controller parameter perturbations. closed loop system pole/eigenvalues to perturbations in the controller ► The eigenvalues pairs closest to the imaginary axis can be weighted more parameters. heavily ► Numerical method for obtaining the solution ► Parameter uncertainty is small so that first-order perturbation equations can be obtained 𝑦 � : 𝑗 = 1, … , 𝑜 � the controllers parameters 2
5/16/2018 9 10 Normal matrix Pseudospectra Robust and non-fragile control systems Robust and non-fragile control systems 5/7/2018 5/7/2018 ↔ 𝐵𝐵 ∗ = 𝐵 ∗ A A is normal A is diagonalizable by a unitary matrix There exists one complete and orthogonal set of eigenvectors of A Eigenvalues describe the behavior of dynamical systems While this is only true for normal matrix For nonnormal matrices eigenvalue analysis proves to be misleading Pseudospectra 11 Pseudospectra(examples) 12 Robust and non-fragile control systems Robust and non-fragile control systems 5/7/2018 5/7/2018 𝜁 − pseudospectrum of A is the set of 𝑨 ∈ 𝐷 1 ST def. (𝑨 − 𝐵) �� = 𝜁 �� 2 nd def. 𝑨 ∈ 𝜏 𝐵 + 𝐹 𝑔𝑝𝑠 𝐹 ∈ 𝐷 �×� , 𝐹 < 𝜁 3 rd def. (𝑨 − 𝐵)𝜉 𝑔𝑝𝑠 𝐹 ∈ 𝐷 � , < 𝜁 𝜉 = 1 3
5/16/2018 State space representation of structured Fragility criterion 13 14 perturbation Robust and non-fragile control systems Robust and non-fragile control systems 5/7/2018 5/7/2018 [5] Where 𝐻(𝑡 � ) �� = � �(�(� � )) is equal to the norm of the smallest perturbation that � 𝑡 � is closed loop eigenvalue of the system Robust stability and performance 15 16 The stability threshold Robust and non-fragile control systems Robust and non-fragile control systems 5/7/2018 5/7/2018 4
5/16/2018 17 Simulation results 18 Robust and nonfragile control system Robust and non-fragile control systems Robust and non-fragile control systems 5/7/2018 5/7/2018 𝑈 � + 𝜍 1 𝜍 ∶ Weighting function 𝐾 = (importance of controller fragility) 𝑌 � 𝑈 � + 𝜍 � Minimize 𝐾 = � � � Conclusions: 19 18 Simulation results Robust and non-fragile control systems Robust and non-fragile control systems 5/7/2018 5/7/2018 Since modern control theory results in higher-order controllers for complicated large scale MIMO systems, controller designs based on fragility and nonnormal matrices would maintain stability for perturbations. Adding the stability threshold to objective function is proved to be effective through several examples with regards to pseudospectra plot 𝑇𝑢𝑠𝑣𝑑𝑢𝑣𝑠𝑓𝑒 𝑞𝑡𝑓𝑣𝑒𝑝𝑡𝑞𝑓𝑑𝑢𝑠𝑏 𝑝𝑔 𝐵 − 𝑑𝑚 𝑇𝑢𝑠𝑣𝑑𝑢𝑣𝑠𝑓𝑒 𝑞𝑡𝑓𝑣𝑒𝑝𝑡𝑞𝑓𝑑𝑢𝑠𝑏 𝑝𝑔 𝐵 − 𝑑𝑚 (𝐼𝑗𝑜𝑔 𝑡𝑧𝑜 𝑛𝑝𝑒𝑗𝑔𝑗𝑓𝑒 𝑑𝑝𝑜𝑢𝑠𝑝𝑚𝑚𝑓𝑠) (𝐼𝑗𝑜𝑔 𝑡𝑧𝑜 𝑑𝑝𝑜𝑢𝑠𝑝𝑚𝑚𝑓𝑠) 5
5/16/2018 References Challenges: 19 [1] L. H. Keel, P. Bhattacharyya, “Robust, fragile or optimal?”, American Control Conference, 1997. Robust and non-fragile control systems 5/7/2018 Proceedings of the 1997. Vol. 2. IEEE, 1997. [2] Bahavarnia, M, Tavazoei, MS. ”A new view to Ziegler–Nichols step response tuning method: analytic non- fragility justification.” J Process Contr 2013; 23: 23–33 Formulating fragility criterion as an convex problem [3] Hamid Zargaran, “Application of Pseudo spectra in synthesis of robust and fault-tolerant control systems”, Finding the optimum value of G(jw) �� M.Sc. Thesis Perturbation to other state matrices [4] L. N. Trefethen and M. Embree, Spectra and pseudospectra: the behavior of nonnormal matrices and operators, Princeton University Press, 2005 [5] D. Hinrichsen and K. Bernd Kelb, Spectral value sets: a graphical tool for robustness analysis, Systems Control Letters, vol. 21, no. 2, pp. 127-136, 1993. Thanks! Any questions? 6
Recommend





More recommend
Explore More Topics
Stay informed with curated content and fresh updates.