MSc in Computer Engineering, Cybersecurity and Artificial - PowerPoint PPT Presentation
MSc in Computer Engineering, Cybersecurity and Artificial Intelligence Course FDE , a.a. 2019/2020, Lecture 15 Design procedure for state observers and observer-based feedback Prof. Mauro Franceschelli Dept. of Electrical and Electronic
MSc in Computer Engineering, Cybersecurity and Artificial Intelligence Course FDE , a.a. 2019/2020, Lecture 15 Design procedure for state observers and observer-based feedback Prof. Mauro Franceschelli Dept. of Electrical and Electronic Engineering University of Cagliari, Italy Monday, 4th May 2020 1 / 45
Outline Design of state observers Design procedure Deadbeat response Separation principle Reduced/minimum order state observer 2 / 45
Design of state observers Introduction • In the previous lecture we discussed asymptotic state observers • Observers which estimate x ( k + 1) from observation of y ( k − 1) and u ( k − 1) are called prediction observers • We now discuss how to systematically design the feedback gain K e of an asymptotic observer 3 / 45
Design of state observers Introduction • In the previous lecture we discussed asymptotic state observers • Observers which estimate x ( k + 1) from observation of y ( k − 1) and u ( k − 1) are called prediction observers • We now discuss how to systematically design the feedback gain K e of an asymptotic observer 3 / 45
Design of state observers Introduction • In the previous lecture we discussed asymptotic state observers • Observers which estimate x ( k + 1) from observation of y ( k − 1) and u ( k − 1) are called prediction observers • We now discuss how to systematically design the feedback gain K e of an asymptotic observer 3 / 45
Design of state observers State observer design Consider the next discrete-time linear system: ① ( k + 1) = ❆① ( k ) + ❇✉ ( k ) ② ( k + 1) = ❈① ( k ) where ❆ is an n × n matrix; ❇ is an n × r matrix; ❈ is an n × 1 matrix; • We now discuss the state observer design for the single output case 4 / 45
Design of state observers State observer design • We assume that the system is both completely state controllable and completely observable. • Thus, the inverse of the observability matrix O T = � ❈ T , ❆ T ❈ T , . . . ( ❆ n − 1 ) T ❈ T � exists. • Also, we consider a system controlled by full-state observer-based feedback u ( k ) = − K ˜ ① ( k ) where K is a rectangular matrix (multi-input case) and is a design input. 5 / 45
Design of state observers State observer design • We assume that the system is both completely state controllable and completely observable. • Thus, the inverse of the observability matrix O T = � ❈ T , ❆ T ❈ T , . . . ( ❆ n − 1 ) T ❈ T � exists. • Also, we consider a system controlled by full-state observer-based feedback u ( k ) = − K ˜ ① ( k ) where K is a rectangular matrix (multi-input case) and is a design input. 5 / 45
Design of state observers State observer design • We assume that the system is both completely state controllable and completely observable. • Thus, the inverse of the observability matrix O T = � ❈ T , ❆ T ❈ T , . . . ( ❆ n − 1 ) T ❈ T � exists. • Also, we consider a system controlled by full-state observer-based feedback u ( k ) = − K ˜ ① ( k ) where K is a rectangular matrix (multi-input case) and is a design input. 5 / 45
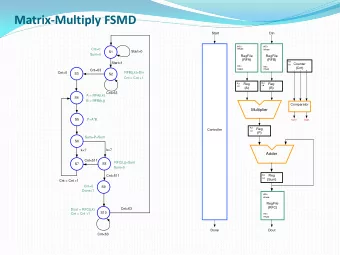
Design of state observers State observer design Matlab Simulink block diagram of a discrete-time linear system with full-order state observer and full-state observer-based feedback 6 / 45
Design of state observers State observer design • The state observer dynamics is given by: ˜ ① ( k + 1) = ❆ ˜ ① ( k ) + ❇✉ ( k ) + ❑ e ( y ( k ) − ˜ ② ( k )) ˜ ② ( k ) = ❈ ˜ ① ( k ) (1) • Where ˜ ① ( k ) is the estimated state of the system, i.e., the observers’ state, and matrix ❑ e is a feedback gain which weights the error between the measure outputs of the system and the current outputs estimated by the observer. 7 / 45
Design of state observers Observable canonical form • Since the system is completely observable, thus there exists a similarity transformation P which puts the system into the observable canonical form with ① ( k ) = P③ ( k ) ③ ( k + 1) = ˆ ❆③ ( k ) + ˆ ❇✉ ( k ) ② ( k ) = ˆ ❈③ ( k ) where 0 0 0 0 − a 0 . . . 1 0 0 0 − a 1 . . . 0 1 0 0 − a 2 . . . ˆ ❆ = . . . . . ... . . . . . . . . . . 0 0 0 0 − a n − 2 . . . 0 0 0 1 − a n − 1 . . . � 0 , ˆ 1 � ❈ = 0 , 0 , 0 , . . . 8 / 45
Design of state observers Observable canonical form The coefficients a 0 , a 1 , . . . , a n − 1 are the coefficients of the characteristic polynomial of matrix ❆ det ( λ I − ❆ ) = λ n + a n − 1 λ n − 1 + . . . + a 2 λ 2 + a 1 λ + a 0 with α n = 1 (monic polynomial) by convention. 9 / 45
Design of state observers Observable canonical form • The similarity transformation P which brings the completely observable system with scalar output into the observable canonical form is: P = ( W O ) − 1 where O T = � ❈ T , ❆ T ❈ T , . . . ( ❆ n − 1 ) T ❈ T � is the full rank observability matrix and a 1 a 2 . . . a n − 1 1 a 2 a 3 . . . 1 0 . . . . . . . . . . W = . . . . . 1 0 0 a n − 1 . . . 1 . . . 0 0 0 10 / 45
Design of state observers State observer design ① ( k ) = P ˜ • Now, by substituting ˜ ③ ( k ) also in the state observer dynamics given by: ˜ ① ( k + 1) = ❆ ˜ ① ( k ) + ❇✉ ( k ) + ❑ e ( y ( k ) − ˜ y ( k )) ② ( k ) = ❈ ˜ ˜ ① ( k ) (2) we obtain ③ ( k + 1) = P − 1 ❆P ˜ ③ ( k ) + P − 1 ❇✉ ( k ) + P − 1 ❑ e ( y ( k ) − ˜ ˜ y ( k )) ˜ ② ( k ) = ❈P ˜ ③ ( k ) (3) 11 / 45
Design of state observers State observer design • The error dynamics of the estimated state ❡ ( k ) = ③ ( k ) − ˜ ③ ( k ) becomes ❡ ( k + 1) = ③ ( k + 1) − ˜ ③ ( k + 1) = P − 1 ❆P③ ( k ) + P − 1 ❇✉ ( k ) − P − 1 ❆P ˜ ③ ( k ) − P − 1 ❇✉ ( k ) − P − 1 ❑ e ( ② ( k ) − ˜ ② ( k )) = P − 1 ❆P③ ( k ) + P − 1 ❇✉ ( k ) − P − 1 ❆P ˜ ③ ( k ) − P − 1 ❇✉ ( k ) − P − 1 ❑ e ( ❈P③ ( k ) − ❈P ˜ ③ ( k )) = P − 1 ❆P ( ③ ( k ) − ˜ ③ ( k )) − P − 1 ❑ e ❈P ( ③ ( k ) − ˜ ③ ( k )) = P − 1 ❆❡ ( k ) − ❑ e ❈P❡ ( k ) P − 1 ❆P − P − 1 ❑ e ❈P � � = ❡ ( k ) = P − 1 ( ❆ − ❑ e ❈ ) P❡ ( k ) Thus, we need to design matrix K e so that matrix ( ❆ − ❑ e ❈ ) has the desired eigenvalues which determine the convergence rate of the state estimation error to zero. 12 / 45
Design of state observers State observer design • The error dynamics of the estimated state ❡ ( k ) = ③ ( k ) − ˜ ③ ( k ) becomes ❡ ( k + 1) = ③ ( k + 1) − ˜ ③ ( k + 1) = P − 1 ❆P③ ( k ) + P − 1 ❇✉ ( k ) − P − 1 ❆P ˜ ③ ( k ) − P − 1 ❇✉ ( k ) − P − 1 ❑ e ( ② ( k ) − ˜ ② ( k )) = P − 1 ❆P③ ( k ) + P − 1 ❇✉ ( k ) − P − 1 ❆P ˜ ③ ( k ) − P − 1 ❇✉ ( k ) − P − 1 ❑ e ( ❈P③ ( k ) − ❈P ˜ ③ ( k )) = P − 1 ❆P ( ③ ( k ) − ˜ ③ ( k )) − P − 1 ❑ e ❈P ( ③ ( k ) − ˜ ③ ( k )) = P − 1 ❆❡ ( k ) − ❑ e ❈P❡ ( k ) P − 1 ❆P − P − 1 ❑ e ❈P � � = ❡ ( k ) = P − 1 ( ❆ − ❑ e ❈ ) P❡ ( k ) Thus, we need to design matrix K e so that matrix ( ❆ − ❑ e ❈ ) has the desired eigenvalues which determine the convergence rate of the state estimation error to zero. 12 / 45
Design of state observers State observer design • Now, choose δ 0 δ 1 K e = P − 1 K e = ˆ . . . δ n − 1 • It holds 0 0 . . . δ 0 δ 0 0 0 . . . δ 1 δ 1 � 0 . . . . P − 1 K e ❈P = 1 � . . . . 0 . . . 0 = . . . . . . . 0 0 . . . δ n − 2 δ n − 1 0 0 . . . δ n − 1 13 / 45
Design of state observers State observer design • Thus 0 0 . . . 0 − a 0 − δ 0 1 0 . . . 0 − a 1 − δ 1 . . . . P − 1 ( A − K e ❈ ) P = P − 1 A P − P − 1 K e ❈P = . . . . . . 0 . . 0 0 0 − a n − 2 − δ n − 2 . . . 0 0 1 − a n − 1 − δ n − 1 . . . Thus matrix ( A − K e ❈ ) due to the invariance of eigenvalues to similarity transformation has characteristic polynomial det ( λ ■ − A + K e ❈ ) = λ n + ( δ n − 1 + a n − 1 ) λ n − 1 + ( δ n − 2 + a n − 2 ) λ n − 2 + ( δ n − 3 + a n − 3 ) λ n − 3 + . . . + ( δ 1 + a 1 ) λ + δ 0 + a 0 14 / 45
Design of state observers State observer design Now, let the desired eigenvalues for matrix ( A − K e ❈ ) be µ 1 , µ 2 , . . . , µ n , thus the desired characteristic polynomial of matrix ( A − K e ❈ ) is det ( λ ■ − A + K e ❈ ) = ( λ − µ 1 )( λ − µ 2 )( λ − µ 3 ) . . . ( λ − µ n ) = λ n + α n − 1 λ n − 1 + α n − 2 λ n − 2 . . . + α 1 λ + α 0 Thus, equating the coefficients corresponding to terms of the same order of the desired characteristic polynomial and the characteristic polynomial of the observer error dynamics we get α 0 = a 0 + δ 0 α 1 = a 1 + δ 1 α 2 = a 2 + δ 2 . . = . . . . α n − 1 = a n − 2 + δ n − 2 α n = a n − 1 + δ n − 1 15 / 45
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.