Mobile robot using different senses Motivation Senses for Robots - PowerPoint PPT Presentation
Mobile robot using different senses Motivation Senses for Robots ISOEN 2002 Sight (Cameras) Hearing (Microphones) M. Wandel*, A. Lilienthal + , A. Zell + , U. Weimar* Touch (Tactile sensors) *ipc, AG Weimar Smell (Gas sensor
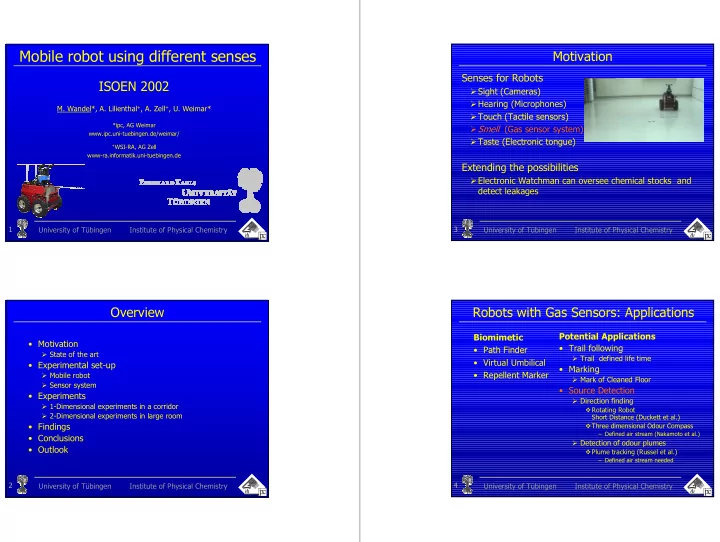
Mobile robot using different senses Motivation Senses for Robots ISOEN 2002 � Sight (Cameras) � Hearing (Microphones) M. Wandel*, A. Lilienthal + , A. Zell + , U. Weimar* � Touch (Tactile sensors) *ipc, AG Weimar � Smell (Gas sensor system) www.ipc.uni-tuebingen.de/weimar/ � Taste (Electronic tongue) + WSI-RA, AG Zell www-ra.informatik.uni-tuebingen.de Extending the possibilities � Electronic Watchman can oversee chemical stocks and detect leakages 1 University of Tübingen Institute of Physical Chemistry 3 University of Tübingen Institute of Physical Chemistry Overview Robots with Gas Sensors: Applications Potential Applications Biomimetic • Motivation • Trail following • Path Finder � State of the art � Trail defined life time • Virtual Umbilical • Experimental set-up • Marking • Repellent Marker � Mobile robot � Mark of Cleaned Floor � Sensor system • Source Detection • Experiments � Direction finding � 1-Dimensional experiments in a corridor � Rotating Robot � 2-Dimensional experiments in large room Short Distance (Duckett et al.) • Findings � Three dimensional Odour Compass – Defined air stream (Nakamoto et al.) • Conclusions � Detection of odour plumes • Outlook � Plume tracking (Russel et al.) – Defined air stream needed 2 University of Tübingen Institute of Physical Chemistry 4 University of Tübingen Institute of Physical Chemistry
Robots with Gas Sensors: Applications Experimental: Sensor System Source Detection Potential Applications Biomimetic VOCmeter Vario • Direction finding • Trail following • Path Finder • Commercially available � Rotating Robot � Trail defined life time • Virtual Umbilical Short Distance (Duckett et al.) • Lightweight, small • Marking � Three dimensional Odour Compass • Repellent Marker • Low power consumption � Mark of Cleaned Floor � Defined air stream (Nakamoto et al.) (24V DC supply possible) • Source Detection • Detection of odour plumes • RS-232 interface � Direction finding � Plume tracking (Russel et al.) � Rotating Robot � Defined air stream needed • Various sensors types Short Distance (Duckett et al.) • Convection / Diffusion profile available (MOX, QMB, U/I) � Three dimensional Odour Compass � Map Building – Defined air stream (Nakamoto et al.) • Up to 8 sensors, connected � No Defined Airstream needed � Detection of odour plumes with thin flexible cables � Plume tracking (Russel et al.) – Defined air stream needed 5 University of Tübingen Institute of Physical Chemistry 7 University of Tübingen Institute of Physical Chemistry Experimental: Mobile Robot “Arthur” 1-Dimensional Location Locations Mobile Robot “ATRV-Jr” • Skid Steering � No ventilation! • Standard PC inside � No personnel traffic • Ultrasonic sensors • Wireless Ethernet Experiments Additional Sensors • Analyte used: Ethanol • Laser range finder • Recordings • Stereoscopic camera � odometry, sensor system, laser range finder, System � temperature, humidity (offline) • Gas sensor system mounted inside the robot, 60cm behind front window 6 University of Tübingen Institute of Physical Chemistry 8 University of Tübingen Institute of Physical Chemistry
Results: 1-Dimensional Location Results: 1-Dimensional Location 14 14 0 0 12 12 10 10 -5 -5 8 8 ∆ n [ppm] ∆ n [ppm] -10 -10 s [m] s [m] 6 6 4 -15 4 -15 2 2 -20 -20 0 0 0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 t [s] t [s] 9 University of Tübingen Institute of Physical Chemistry 11 University of Tübingen Institute of Physical Chemistry Results: 1-Dimensional Location Determination of Source Position 14 14 0 10 4 0 12 12 10 -5 10 5 -5 3 8 8 ∆ c [ppm] ∆ c [ppm] ∆ n [ppm] -10 -10 0 s [m] 6 6 s [m] s [m] 2 4 -15 -15 -5 4 2 2 -20 1 -20 -10 0 0 0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 2500 2750 3000 3250 3500 3000 3100 3200 3300 t [s] t [s] t [s] 10 University of Tübingen Institute of Physical Chemistry 12 University of Tübingen Institute of Physical Chemistry
2-Dimensional Location Comparison Summer - Winter • Unventilated Summer Winter • One side of the room is a window front • The automatic source was placed in the middle of the room • The robot’s path describes a rectangular helix ] signal [a.u.] . u . a [ l a n g i s 0 0 2 2 4 4 5 5 6 6 y 4 4 8 3 8 3 2 2 10 10 1 1 12 0 12 0 x 13 University of Tübingen Institute of Physical Chemistry 15 University of Tübingen Institute of Physical Chemistry Results 2-Dimensional Location Peaks / Position 4,0 3,5 signal [a.u.] 3,0 Y [m] 2,5 2,0 1,5 Summer 0 1,0 Winter 2 4 5 6 4 8 3 2 0 2 4 6 8 10 12 10 1 12 0 X [m] 14 University of Tübingen Institute of Physical Chemistry 16 University of Tübingen Institute of Physical Chemistry
Time of Occurrence Conclusion Signal (baseline) • In a 1-dimensional environment the position Signal (peak) Online computed baseline of the source can be estimated within a range Offline fit of 1m • In 1- and 2-dimensional environment the signal / a.u. time of occurrence of the leak can be computed with good precision • The measured concentration profile requires time consuming search strategies e.g. map building, this is possible because of the stable concentration profile 0 1000 2000 3000 4000 t open, predicted 0 1000 2000 3000 4000 t open, real time / s t [s] 17 University of Tübingen Institute of Physical Chemistry 19 University of Tübingen Institute of Physical Chemistry Findings Outlook • Signal nearly independent of stick position • Implementation of a feedback from the sensor signal evaluation to the driving • Simple mounting of the sensor, without fan, programme without pumping unit, sufficient • Larger rooms • Meaningful measurements only during movement • Classification of the analyte • Even small leaks can be detected � Using a sensor system with different sensors including QMBs and pattern recognition software • Testing in real world environment 18 University of Tübingen Institute of Physical Chemistry 20 University of Tübingen Institute of Physical Chemistry
Acknowledgements Landesforschungsschwerpunktsprojekt Baden-Württemberg Sensing organs for mobile robots Project partners: • Wilhelm-Schickard-Institut für Informatik, AG Zell (coordinator) • Zoologisches Institut, AG Schnitzler • Institut für Physikalische und Theoretische Chemie, AG Weimar 21 University of Tübingen Institute of Physical Chemistry Thank You 22 University of Tübingen Institute of Physical Chemistry
Recommend
















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.