Robot behaviour and control A robot can be defined as an intelligent - PowerPoint PPT Presentation
Robot behaviour and control A robot can be defined as an intelligent link between perception and action Robot Action Perception Environment www.biorobotics.ttu.ee For a mobile robot Knowledge, Mission Data Base Commands Cognition
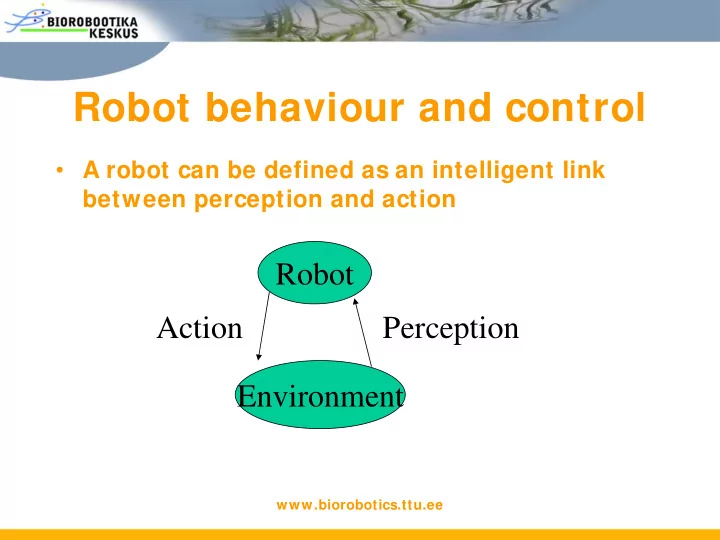
Robot behaviour and control • A robot can be defined as an intelligent link between perception and action Robot Action Perception Environment www.biorobotics.ttu.ee
For a mobile robot Knowledge, Mission Data Base Commands Cognition Localization "Position" Path Planning Map Building Global Map Environment Model Path Local Map Information Path Motion Control Extraction Execution Perception Raw data Actuator Commands Sensing Acting Real World Environment www.biorobotics.ttu.ee
Reacting to the world • Deliberate – Creating a world model – Making a plan – Execution and monitoring the outcomes • Reflexive behaviour – Immediate reaction to stimuli • Hybrid planners – Reflexive locally, deliberate globally www.biorobotics.ttu.ee
Behaviour-based robots • Robot behaviours are defined as sensor- motor pairs • Connect stimuli to reactions without intermediate deliberate thinking (“ the world is its own best model”) • Reactive robots have no internal representations • Reactive robots have no memory www.biorobotics.ttu.ee
Braitenberg vehicles www.biorobotics.ttu.ee R. Arkin, “Behavior-based robotics”
Braitenberg vehicles http://people.cs.uchicago.edu/~wiseman/vehicles R. Arkin, “Behavior-based robotics” www.biorobotics.ttu.ee
Common behaviours • Moving towards a light source • Moving away from a light source • Obstacle avoidance • Wall following • Line following • Wandering • Maintaining stability www.biorobotics.ttu.ee
BEAM robotics • BEAM – Biology, Electronics, Aesthetics, Mechanics • Uses simple analog circuits to produce an unusually simple design • Analog circuits are used to simulate biological neuron behaviours www.biorobotics.ttu.ee
Design of behaviour based robots • What behaviours do we need for the robot to fulfil its tasks? • Create sensor-motor pairs. What are the stimuli triggering a behaviour and what are the reactions? • Modular design – combine behaviours to get more complicated behaviours www.biorobotics.ttu.ee
Emergent behaviours • Emergent behaviour – collection of behaviours produce results that were not explicitly programmed • The Behavior-Based approach states that intelligence is the result of the interaction among a set of behaviors and the environment (“ Intelligence is in the eye of the observer “). www.biorobotics.ttu.ee
Qualities of emergent behaviours • Robust and resilient • Easy to design • Fault tolerant due to the lack of central control • Fast due to the lack of symbolic representation and planning www.biorobotics.ttu.ee
Comparison of deliberate and reactive robots www.biorobotics.ttu.ee
Subsumption architectures • R: Brooks, 1986 • Designing reactive architectures bottom-up using layered sets of rules • Bottom layer behaviours are mostbasic and have highest priority • Top level behaviours encapture high-level intentions • Uppler lever can only function if lower level behaviours are satisfied • Minimal interaction between behaviours www.biorobotics.ttu.ee
Swarm intelligence • based on the collective behavior of decentralized, self-organized systems • Swarm consists of a small number of simple physical robots • desired collective behavior emerges from the interactions between the robots and interactions of robots with the environment. http://www.newscientist.com www.biorobotics.ttu.ee
Designing behaviour-based robots. Ethological design • The behaviours are consistent with biological evidence R. Arkin, “Behavior-based robotics” www.biorobotics.ttu.ee
Designing behaviour-based robots. Situation-based design • The reaction of the robot depends on the situation R. Arkin, “Behavior-based robotics” www.biorobotics.ttu.ee
Designing behaviour-based robots. Experimental design • Bottom-up R. Arkin, “Behavior-based robotics” www.biorobotics.ttu.ee
Representing behaviours • Functional representation • b(s) = r – b – behaviour – s – stimulus – r – reaction www.biorobotics.ttu.ee
Representing behaviours • Finate-state automata • M := (Q, δ , q 0 , F) – Q – set of behaviours – δ – transfer function – q 0 – initial behaviour δ q Input δ (q, input) – F – set of states b a b M = {{b}, δ , b, {b} } www.biorobotics.ttu.ee
Representing behaviours • Navigating to the lecture room with FSA diagram www.biorobotics.ttu.ee
Coding reactions • Magnitude of reactions • Direction of reactions • Behaviour (S, R, β ) – S – stimulus – R – reaction – β : S � R www.biorobotics.ttu.ee
Discrete coding R. Arkin, “Behavior-based robotics” www.biorobotics.ttu.ee
Continuous coding R. Arkin, “Behavior-based robotics” www.biorobotics.ttu.ee
Coordination of behaviours. Priority based coordination (subsumption) R. Arkin, “Behavior-based robotics” www.biorobotics.ttu.ee
Action selection R. Arkin, “Behavior-based robotics” www.biorobotics.ttu.ee
Action coordination R. Arkin, “Behavior-based robotics” www.biorobotics.ttu.ee
Action coordination of obstacle avoidance and goal following R. Arkin, “Behavior-based robotics” www.biorobotics.ttu.ee
Action coordination of obstacle avoidance and goal following R. Arkin, “Behavior-based robotics” www.biorobotics.ttu.ee
Home assignment Mandatory: Braitenberg vehicles. Use the Braitenberg vehicle simulator at http://www.ai.rug.nl/~gert/applets/braitenbergJRE/ Observe the behaviour of the vehicles in response to the light inc ase of different placements of light sources . Voluntary: implement obstacle avoidance Brainteberg vehicles behaviour in the robot simulator R. Arkin, “Behavior-based robotics” www.biorobotics.ttu.ee
Recommend

















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.