Lecture 17 PID: Tuning and Practial Issues Process Control Prof. - PowerPoint PPT Presentation
Lecture 17 PID: Tuning and Practial Issues Process Control Prof. Kannan M. Moudgalya IIT Bombay Monday, 2 September 2013 1/30 Process Control PID: Tuning and Practical Issues Outline 1. Recalling PI controller 2. Derivative mode 3. PID
Lecture 17 PID: Tuning and Practial Issues Process Control Prof. Kannan M. Moudgalya IIT Bombay Monday, 2 September 2013 1/30 Process Control PID: Tuning and Practical Issues
Outline 1. Recalling PI controller 2. Derivative mode 3. PID controller 2/30 Process Control PID: Tuning and Practical Issues
1. Recalling PI controller 3/30 Process Control PID: Tuning and Practical Issues
I order system and proportional controller y sp e u y G c G − ◮ Take proportional controller, i.e., G c = K c K ◮ Take first order system, i.e., G = τ s + 1 1 ◮ Steady state error = 1 + KK c ◮ SS error can be made small by making K c large ◮ Because of unmodelled dynamics, G may actually be a second order system! ◮ Recall SBHS! 4/30 Process Control PID: Tuning and Practical Issues
Shortcomings of indefinite increase in K c × × ◮ Increase K c to bring the closed loop poles inside desired region ◮ Indefinite increase of K c will take root locus outside desired region ◮ Large overshoot and lots of oscillations in this case! 5/30 Process Control PID: Tuning and Practical Issues
Trade off between offset & control action Recall the closed loop system: ∆ Y sp E ∆ U ∆ Y K c G − ◮ Zero error E ⇒ ∆U = 0 ◮ This implies zero control action with respect to nominal value of U ◮ Servo/tracking control (set point changes) cannot be implemented ◮ Can we have both E = 0 and ∆U � = 0 with finite K c ? 6/30 Process Control PID: Tuning and Practical Issues
Introducing Integral Mode � t u(t) = u + 1 e(w)dw τ i 0 ◮ Even a 0 value of e(t) can give rise to nonzero values of u(t)! ◮ τ i is reset time or integral time ◮ Recall u(t) ↔ U(s) ◮ ∆U(s) = 1 τ i sE(s) ◮ Normally, we use a proportional-integral (PI) controller 7/30 Process Control PID: Tuning and Practical Issues
PI controller PI controller: � t � e(t) + 1 � u(t) = u + K c e(w)dw τ i 0 or � 1 + 1 � ∆U(s) = K c E(s) τ i s ◮ What is the steady state offset now? 8/30 Process Control PID: Tuning and Practical Issues
MCQ on PI controller terminology Consider the PI controller: � 1 + 1 � ∆U(s) = K c E(s) τ i s Integral action/effort increases implies 1. τ i increases 2. τ i decreases 3. This has nothing to do with τ i Answer: 2 9/30 Process Control PID: Tuning and Practical Issues
Integral mode generalises proportional mode PI controller: 1 + 1 � � ∆U(s) = K c E(s) τ i s or � t e(t) + 1 � � ∆u(t) = K c e(w)dw τ i 0 � t 1 = K c e(t) + K c e(w)dw τ i 0 With e constant, after every t = τ i , K c e gets added! 10/30 Process Control PID: Tuning and Practical Issues
MCQ on PI Controller A PI controller is put in a closed loop with a first order system. A step input is given in the set point. 1. As the integral mode generalises the proportional mode, increasing the integral action makes the error very small, but not zero 2. As the integral mode generalises the proportional model, increasing the integral efforts results in larger oscillations in response and also the offset - the offset does not reach a steady state 3. The offset goes to zero 11/30 Process Control PID: Tuning and Practical Issues
Why not use integral mode ALONE? Covered in the last class: integral windup 12/30 Process Control PID: Tuning and Practical Issues
2. Derivative mode 13/30 Process Control PID: Tuning and Practical Issues
Derivative Mode M p y ( t ) t r t p t s ◮ Often need to reduce the oscillations ◮ Need to use the slope information 14/30 Process Control PID: Tuning and Practical Issues
Derivative Mode - ctd ◮ Derivative mode is given by de(t) u(t) = u + τ d dt τ d is the derivative time ◮ Intuitive explanation in B. C. Kuo ◮ Problem: noise; so used with prop. cont. ◮ For an open loop stable system, increase in derivative mode generally results in ◮ decreased oscillations. ◮ Will it have any effect at steady state? ◮ Remember this while tuning the derivative mode 15/30 Process Control PID: Tuning and Practical Issues
PD Controller ◮ Derivative mode is not used alone ◮ PD controller is usually used ◮ Reason: noise ◮ ∆U(s) = K c (1 + τ d s) E(s) ◮ What is the effect of this controller on overdamped second order system? 16/30 Process Control PID: Tuning and Practical Issues
PD control to II order overdamped system 1 1 ◮ G(s) = (s + 1)(s + 2) = s 2 + 3s + 2 ◮ What is the effect of PD controller: G c = K c (1 + τ d s) ◮ Use root locus ◮ But root locus works only with K c ◮ Answer: Combine the zero with G (1 + τ d s) ◮ Study root locus of G 1 = (s + 1)(s + 2) ◮ Effect of derivative mode can be studied by addition of zeros! 17/30 Process Control PID: Tuning and Practical Issues
Derivative mode on an oscillating system × × ◮ Try the PD controllers for 1 G(s) = (s + 1)(s + 2) 1. K c (1 + 0 . 5s) 2. K c (1 + 1 . 5s) 3. K c (1 + 3s) 18/30 Process Control PID: Tuning and Practical Issues
Zero to the left of poles Evans root locus 2.0 asymptotic directions open loop poles 1.5 open loop zeroes 1.0 0.5 Imaginary axis 0.0 - 0.5 - 1.0 - 1.5 - 2.0 - 6 - 5 - 4 - 3 - 2 - 1 19/30 Process Control PID: Tuning and Practical Issues Real axis
Zero to the left of poles Evans root locus 2.0 asymptotic directions open loop poles 1.5 open loop zeroes 1.0 0.5 Imaginary axis 0.0 - 0.5 - 1.0 - 1.5 - 2.0 - 6 - 5 - 4 - 3 - 2 - 1 Real axis ◮ Only K c : poles would have gone to ∞ ◮ The zero brings the locus back to real axis ◮ Can make it as damped as required ◮ What happens to other locations? 20/30 Process Control PID: Tuning and Practical Issues
Effect of zero on an overdamped II order system 1 1 ◮ G(s) = (s + 1)(s + 2) = s 2 + 3s + 2 ◮ G c = K c (1 + τ d s) ◮ Zero < − 2 results in a root locus plot as given in the previous page ◮ 0 > Zero > − 2 results in the root locus lying entirely on real axis, making the closed loop system overdamped and stable ◮ An example of the derivative mode reducing oscillations 21/30 Process Control PID: Tuning and Practical Issues
Effect of derivative mode on oscillating system A system oscillates a lot and reaches a steady state with offset. Increase in derivative action is expected to 1. Increase the oscillations 2. Decrease the oscillations and offset 3. Decrease the oscillations only 4. Increase both oscillations and offset Ans: 3 22/30 Process Control PID: Tuning and Practical Issues
3. PID controller 23/30 Process Control PID: Tuning and Practical Issues
PID controller PID controller has proportional, integral and derivative modes: � t � e(t) + 1 de(t) � u(t) = u + K c e(w)dw + τ d τ i dt 0 ◮ e is error, u is control effort and u is the steady state value of u ◮ It has three tuning parameters, K c , τ i , τ d ◮ Recall the tuning guidelines to change these parameters 24/30 Process Control PID: Tuning and Practical Issues
How does one design the PID controller? ◮ By trial and error, using tuning methods ◮ By direct synthesis ◮ Using advanced control techniques and implementing them as PID ◮ Will study the most popular tuning method 25/30 Process Control PID: Tuning and Practical Issues
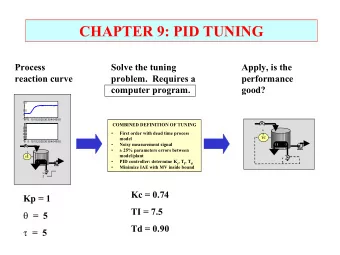
Reaction Curve - Ziegler Nichols Tuning ◮ Applicable only to stable systems ◮ Give a unit step input and get R = K/τ K L τ 1. the time lag after which the system starts responding (L), 2. the steady state gain (K) and 3. the time the output takes to reach the steady state, after it starts responding ( τ ) 26/30 Process Control PID: Tuning and Practical Issues
Reaction Curve - Ziegler Nichols Tuning R = K/τ K L τ Calculate slope, R = K /τ 27/30 Process Control PID: Tuning and Practical Issues
Reaction Curve Method Ctd. R = K/τ K L τ PID settings are given below: K c τ i τ d P 1/RL PI 0.9/RL 3L PID 1.2/RL 2L 0.5L Consistent units should be used 28/30 Process Control PID: Tuning and Practical Issues
What we learnt today ◮ P, I, D modes ◮ Guidelines for tuning ◮ Ziegler-Nichols methods 29/30 Process Control PID: Tuning and Practical Issues
Thank you 30/30 Process Control PID: Tuning and Practical Issues
Recommend


More recommend
Explore More Topics
Stay informed with curated content and fresh updates.