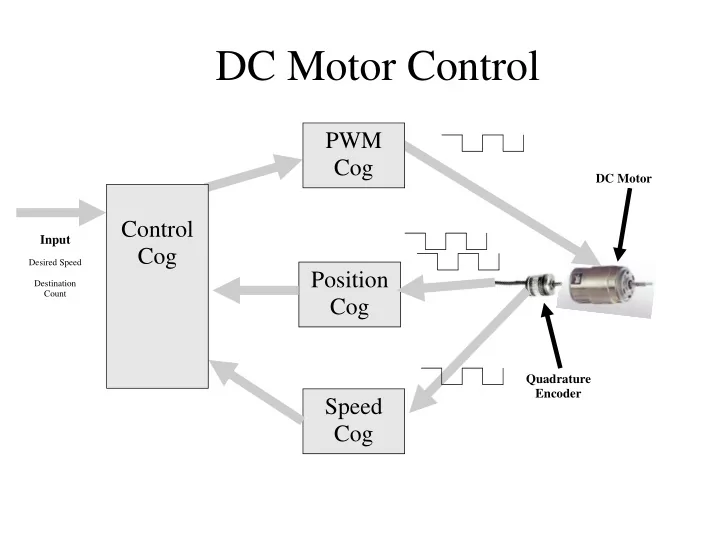
DC Motor Control PWM Cog DC Motor Control Input Cog Desired Speed Position Destination Count Cog Quadrature Encoder Speed Cog
Proportional w Inertia DC Motor Control To maintain constant speed Even after Motor Power is re- Motor Power duced the motor continues to spin past desired speed. Power To Motor Motor Speed (Load) Motor Power
Proportioal DC Motor Control To maintain constant speed DC Motor PWM Gain Cog Control Quadrature Encoder Cog Calculates Error of Speed Speed Cog Input Measures Rate Of Pulses Desired Speed ie Speed
Proportioal DC Motor Control To maintain constant speed Speed as measured by encoder
Proportional Derivative DC Motor Control To maintain constant speed DC Motor PWM Sum Gain Cog Error Control Quadrature Derivative Encoder Cog Subtract this error Gain from last Calculates Error of Speed Speed Cog Input Measures Rate Desired Speed Of Pulses ie Speed
Proportional Derivative DC Motor Control To maintain constant speed Desired Speed
Proportional Intergral Derivative (PID) DC Motor Control To maintain constant speed DC Motor Intergral Gain Sum last 100 errors PWM Sum Gain Error Cog Control Quadrature Derivative Encoder Cog Subtract this error Gain from last Calculates Error of Speed Speed Cog Input Measures Rate Desired Speed Of Pulses ie Speed
Proportional Integral Derivative (PID) DC Motor Control To maintain constant speed Desired speed Proportional Integral Derivative Control Can produce a Critically Damped system
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries