2 K s 10 s 100 4 3 2 s 20 s 100 s 500 s - PowerPoint PPT Presentation
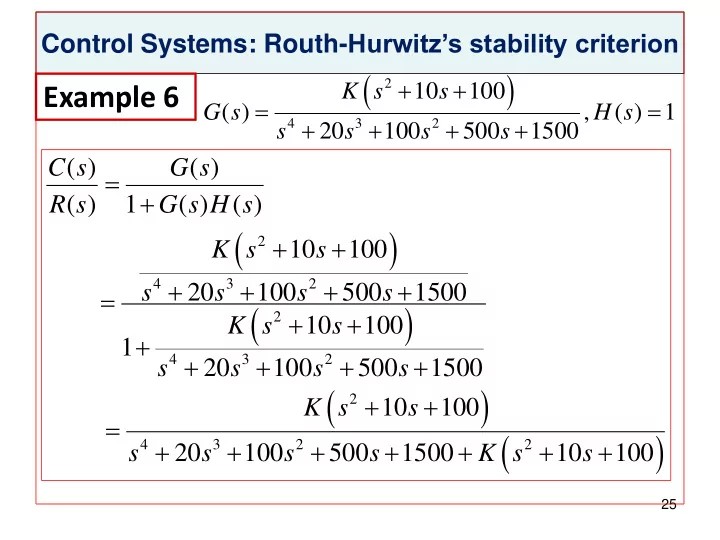
Control Systems: Routh- Hurwitzs stability criterion 2 K s 10 s 100 Example 6 G s ( ) , H s ( ) 1 4 3 2 20 100 500 1500 s s s s C s ( ) G s ( ) R s ( ) 1 G
Control Systems: Routh- Hurwitz’s stability criterion 2 K s 10 s 100 Example 6 G s ( ) , H s ( ) 1 4 3 2 20 100 500 1500 s s s s C s ( ) G s ( ) R s ( ) 1 G s H s ( ) ( ) 2 K s 10 s 100 4 3 2 s 20 s 100 s 500 s 1500 2 K s 10 s 100 1 4 3 2 s 20 s 100 s 500 s 1500 2 K s 10 s 100 4 3 2 2 20 100 500 1500 10 100 s s s s K s s 25
Control Systems: Routh- Hurwitz’s stability criterion Example 6 Method I using determinants 4 3 2 B s ( ) s 20 s s (100 K ) s (500 10 ) 1500 100 K K a a 0 20 500 10 K 0 3 1 a a a 1 100 K 1500 100 K 3 4 2 0 0 a a 0 20 500 10 K 3 1 The value of ∆ 1 =20 >0 and the value of ∆ 2 =1500+10K >0 , 100( K 7.8)( K 192.2) 7.8 < K < 192.2 conditions for 3 stability 26
Control Systems: Routh- Hurwitz’s stability criterion Example 6 Method II using array 4 3 2 B s ( ) s 20 s s (100 K ) s (500 10 ) 1500 100 K K n s a a a 4 2 0 1 n 0 s a a 3 1 a a a a a a n 2 3 2 4 1 3 o s b b 0 3 0 a a 3 3 b a b a n 3 3 1 0 3 s b 3 27
Control Systems: Routh- Hurwitz’s stability criterion Example 6 Method II using array n s 1 100 K 1500 100 K n 1 s 20 500 10 K 0 1500 10 K n 2 s 1500 100 K 0 20 100( K 7.8)( K 192.2) n 3 s 1500 10 K conditions for 7.8 < K < 192.2 stability 28
Control Systems: Routh- Hurwitz’s stability criterion Example 7 K ( ) , ( ) 1 G s H s 4 3 2 s s s s C s ( ) G s ( ) ( ) 1 ( ) ( ) R s G s H s K 4 3 2 s s s s 4 3 2 B s ( ) s s s s K K 1 4 3 2 s s s s K 4 3 2 s s s s K 29
Control Systems: Routh- Hurwitz’s stability criterion Example 7 Method I using determinants 1 1 0 1 1 K 3 ∆ 1 =1 >0 and the value of ∆ 2 =0. ∆ 3 =-K 0 1 1 The system is unstable for all values of K 30
Control Systems: Routh- Hurwitz’s stability criterion Example 7 Method II using array 4 3 2 B s ( ) s s s s K n s a a a 4 2 0 n 1 s a a 0 3 1 a a a a a a n 2 3 2 4 1 3 o s b b 0 3 0 a a 3 3 b a b a n 3 3 1 0 3 s b 3 31
Control Systems: Routh- Hurwitz’s stability criterion Example 7 Method II using array 4 s 1 1 K 3 s 1 1 0 2 The system is unstable for all values 0 s K of K K 1 s 1 0 0 0 s K 0 0 32
ME 779 Control Systems Topic #14 Controller Basics Reference textbook : Control Systems, Dhanesh N. Manik, Cengage Publishing, 2012 1
Control Systems: Controller Basics Learning Objectives • Proportional controllers • Proportional and derivative controllers • Proportional and integral controllers • Proportional, integral and derivative controllers 2
Control Systems: Controller Basics Closed-loop (feedback) systems Block diagram 3
Control Systems: Controller Basics Proportional controller for inertia load Proportional controller Proportional control system for inertia load 4
Control Systems: Controller Basics Proportional controller for inertia load K p K K Closed-loop response C s ( ) 2 Js p p 2 2 2 K R s ( ) Js K J s ( ) p p n 1 2 Js K p n J c t ( ) 1 cos t Step response n 5
Control Systems: Controller Basics Proportional controller for inertia load Step response 6
Control Systems: Controller Basics Proportional plus derivative controller for inertia load Proportional plus derivative controller K d T d K p Proportional and derivative control for inertial load 7
Control Systems: Controller Basics Proportional plus derivative controller for inertia load K (1 T s ) p d ( ) (1 ) G s K T s K (1 T s ) ( ) C s 2 c p d Js p d (1 ) 2 K T s R s ( ) Js K (1 T s ) p d p d 1 2 K K Js T p d p K (1 T s ) 2 J n p d J K T K p d p 2 J s s J J K p t ( ) 1 cos sin c t e t t n d d 2 J 2 1 n Step response K T 1 p d t 2 e sin 1 t n n J 2 1 n 8
Control Systems: Controller Basics Proportional plus derivative controller for inertia load K (1 T s ) p d C s ( ) 2 Js cs K (1 T s ) ( ) R s p d 1 2 Js cs K (1 T s ) p d 2 Js s c ( K T ) K p d p c K T 1 p d 2 JK p K (1 T s ) C s ( ) p d 2 2 R s ( ) J s ( 2 s ) n n 9
Control Systems: Controller Basics Proportional plus derivative controller for inertia load K p t c t ( ) 1 e cos t sin t n d d 2 Step response J 2 1 n K T 1 p d t 2 e sin 1 t n n J 2 1 n Derivative control adds K p c ( ) 1 damping to the system J 2 n 10
Control Systems: Controller Basics Comparison of proportional and integral controllers Integral Proportional K K i G p G 2 1 s s ( 1) s 1 E s ( ) 1 s 1 E s ( ) 1 1 s s ( 1) 1 2 K 2 R s ( ) 1 G s ( ) s 2 R s ( ) 1 G s ( ) s s 1 i 1 2 1 s s ( 1) 11
Control Systems: Controller Basics Comparison of proportional and integral controllers Integral Proportional E s ( ) 1 1 s s ( 1) E s ( ) 1 s 1 2 1 K 2 R s ( ) 1 G s ( ) s s 1 i R s ( ) 1 G s ( ) s 2 1 2 1 s s ( 1) K ( s 1) U s ( ) K s ( 1) U ( ) s p 2 1 i 2 R s ( ) s s 1 R s ( ) ( s 2) C s ( ) 1 1 C s 1 ( ) 1 1 2 2 2 R s ( ) s s K s s 1 R s ( ) s 1 K s 2 i p 12
Control Systems: Controller Basics Comparison of proportional and integral controllers Step response Integral Proportional 3 1 3 e 1 0.5 t 2 t e t ( ) e cos t sin t e t ( ) 1 2 2 2 3 1 2 e 1 2 t 1 3 3 u t ( ) 1 0.5 t u t ( ) 1 e sin t cos t 1 2 2 2 2 3 e 1 2 t 1 3 3 c t ( ) 1 0.5 t c t ( ) 1 e sin t cos t 1 2 2 2 2 3 13
Control Systems: Controller Basics Comparison of proportional and integral controllers Steady-state error for step input 14
Control Systems: Controller Basics Comparison of proportional and integral controllers Plant input for step input 15
Control Systems: Controller Basics Comparison of proportional and integral controllers Closed-loop response for step input 16
Control Systems: Controller Basics PI (proportional-integral) controllers 17
Control Systems: Controller Basics PI (proportional-integral) controllers sK K K 1 p i i G K p 1 ( 1) s s s s E s ( ) 1 s s ( 1) 2 R s ( ) 1 G s ( ) s s (1 K ) K 1 p i ( s 1)( sK K ) U ( ) s p i 1 2 R s ( ) s s (1 K ) K p i 18
Control Systems: Controller Basics PI (proportional-integral) controllers ( sK K ) C s ( ) 1 p i 2 ( ) (1 ) ( 1) R s s s K K s p i u t e t ( ) 1 e t ( ) Step response e t c t ( ) 1 19
Control Systems: Controller Basics PI (proportional-integral) controllers Steady-state error for step input 20
Control Systems: Controller Basics PI (proportional-integral) controllers Plant input for step input 21
Control Systems: Controller Basics PI (proportional-integral) controllers Closed-loop response for step input Integral control reduces steady- state error 22
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.