
Lab 11. Speed Control of a D.C. motor Motor Characterization Motor - PowerPoint PPT Presentation
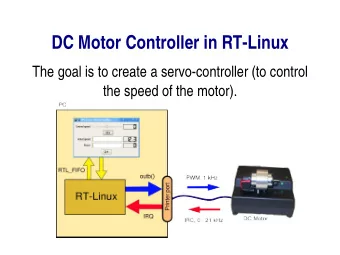
Lab 11. Speed Control of a D.C. motor Motor Characterization Motor Speed Control Project Generate PWM waveform 1. Amplify the waveform to drive the motor 2. Measure motor speed 3. Estimate motor parameters from measured data 4. Regulate
Lab 11. Speed Control of a D.C. motor Motor Characterization
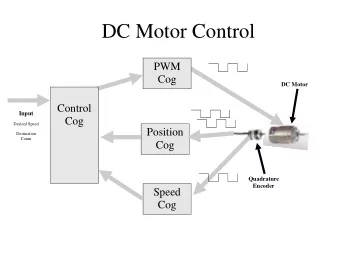
Motor Speed Control Project Generate PWM waveform 1. Amplify the waveform to drive the motor 2. Measure motor speed 3. Estimate motor parameters from measured data 4. Regulate speed with a controller 5. 12v DC Tachometer Motor Speed 9v Measurement Power Amplifier Labs 11/12 Supply Computer System
Goals of this lab Experimentally determine the control system model of the motor/hardware setup Measure response to a step input (determine time constant, gain, etc.) This model will be used in the design of a speed controller
Motor control system modeled as a feedback system (Frequency domain model) PWM signal Software User entry (system input) Tachometer + comparator/counter (period) or envelope detector (amplitude)
Simplified system model Duty cycle of Determine PWM signal Switch experimentally setting Motor and Control Electronics Error Action Setpoint E(S) X(S) Controller The Plant R(s) + C(S) G(S) _ Measured Signal Y(S) Computer Software period or amplitude
What goes into the plant G ( s )? Amplifier dynamics Electrical dynamics (motor winding has inductance and resistance) Mechanical dynamics (motor rotor has inertia and experiences friction) Sensor dynamics (filter has capacitance and resistance) OVERALL: A 3rd order model (or higher)
An Empirical Modeling Approach Experimentally determine “plant” model, G(s) Apply a “step input” to the Plant 1. step change in the duty cycle of the PWM signal driving the motor Measure the motor system “response” to this 2. step input measure speed change over time Derive parameters of G(s) from the measured 3. response
Response y ( t ) of a 1st-order system to a step input x ( t ) y ( t ) Motor speed x ( t ) (ADC reading) t Plant input = change in PWM duty cycle (at t = 0)
First-order system model System equation: x(t) = system input dy y(t) = system output = τ + Kx ( t ) y ( t ) K = gain dt τ = time constant Solution if step input applied at t=0 (step response): − / τ ∆ = ∆ − t ∆ x = input change y ( t ) K x ( t )( e ) 1 at time t=0 Laplace transform (plant transfer function): Y ( s ) K = = G ( s ) τ + X ( s ) s 1
Experimentally determining G ( s ) for the first-order system After the transient period (t large) , study output y: ∆ = ∆ y K x Experimentally measure ∆ y change in y (after large t ) = K to compute gain, K . ∆ x At t= τ , step response is: Experimentally measure − τ τ τ = ∆ − / y ( ) K x ( 1 e ) time at which y(t) = 63.2% τ = ∆ of final value to determine y ( ) K x ( 0 . 632 ) time constant, τ.
Finding gain K ∆ y ∆ y = K ∆ x ∆ x large t t
Finding time constant τ ∆ y ∆ 0 . y 632 ∆ x t = 0 t τ ≈ τ τ settling time 4 or 5
Verify model in MATLAB/Simulink (Controller to be added to this to compute the controller parameters.)
First-order response with delay − ∆ y ( t ) y ( t t ) ∆ x ∆ t t
First-order system with delay K − ∆ = ts G ( s ) e τ + s 1 e ∆ − ts represents time delay ∆ t
Second-order step response underdamped critically damped overdamped (real, unequal poles)
Underdamped 2nd-order model ( ) ω 2 Y s = = n G ( s ) K ( ) + ζω + ω 2 2 X s s s 2 n n gain damping undamped natural factor frequency
2nd-order model character (a) Underdamped ( 0 < ζ < 1 ) model has complex conjugate poles: = − ζω ± ω 1 ζ − 2 s j , n n 1 2 Re Im time constant: inverse of the |Re| part 1 τ = ζω n
Underdamped step response damped oscillatio n π 2 ω = frequency d period overshoot ∆ y ∆ y = K ∆ x ∆ x t ≈ τ settling time 4
2nd-order model character (b) oscillation frequency (rad/s): Im part ω d = ω n 1 − ζ 2 overshoot (% of final value) − Re π % overshoot = e × 100 Im a function only of damping factor
Other 2nd-order forms Critically damped model has 2 equal poles ( ) K = G s ( ) τ + 2 s 1 Overdamped model has unequal poles ( ) K = G s ( )( ) τ + τ + s s 1 1 1 2
Lab Procedure Re-verify hardware/software from previous labs Modify software to measure the period (or voltage) of the tachometer signal following a step input “Step input” = change in selected speed Save values in an array that can be transferred to the host PC after the motor is stopped Plot measured speed vs. time Choose a model (1st-order? 2nd-order?) Determine model parameters and write the transfer function G ( s ) Compare step response of G ( s ) to the experimental response (suggested tool: MATLAB/Simulink)
Recommend










More recommend
Explore More Topics
Stay informed with curated content and fresh updates.