CSE 473: Artificial Intelligence Hidden Markov Models Daniel Weld - PDF document
CSE 473: Artificial Intelligence Hidden Markov Models Daniel Weld University of Washington [Many of these slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at
CSE 473: Artificial Intelligence Hidden Markov Models Daniel Weld University of Washington [Many of these slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.] 1 Agent vs. Environment § An agent is an entity Agent that perceives and acts . Sensors § A rational agent selects Percepts actions that maximize its Environment utility function . ? Actuators Actions Deterministic vs. stochastic Fully observable vs. partially observable 3 1
It’s Hard! Deterministic vs. stochastic Fully observable vs. partially observable 4 Partial Observability in Pacman § A ghost is in the grid somewhere, but Pacman can’t see it! § Sensor readings tell how close a square is to the ghost § On the ghost: red § 1 or 2 away: orange § 2 or 3 away: yellow § 4+ away: green § Sensors are noisy , but we know P(Color | Distance) P(red | 3) P(orange | 3) P(yellow | 3) P(green | 3) Etc. 0.05 0.15 0.5 0.3 5 2
Pacman Maintains a Belief about Ghost Locations Belief = A Probability Distribution over possible locations Visualized here as color density (each ghost has its own color) Four ghosts shown here (not to be confused with colors from sensor readings) 6 Video of Demo Pacman – Sonar (with beliefs) 7 3
PROBABILITY REVIEW 8 8 Random Variables § A random variable is some aspect of the world about which we (may) have uncertainty § R = Is it raining? § T = Is it hot or cold? § D = How long will it take to drive to work? § L = Where is the ghost? § We denote random variables with Capital Letters § Random variables have domains (possible outcomes) § T in {hot, cold} § D in [0, ¥ ) § L in possible locations, maybe {(0,0), (0,1), …} 9 4
Joint Distributions § A joint distribution over a set of random variables: specifies a probability for each assignment (or outcome ): T W P § Must obey: hot sun 0.4 hot rain 0.1 cold sun 0.2 cold rain 0.3 § Number of parameters to specify joint distribution if n variables, each with |domain| = d? § d n -1 For all but the smallest distributions, impractical to write out! 10 Marginal Distributions § Marginal distributions are sub-tables which eliminate variables § Marginalization (summing out): Combine collapsed rows by adding T P hot 0.5 T W P cold 0.5 hot sun 0.4 hot rain 0.1 cold sun 0.2 W P cold rain 0.3 sun 0.6 rain 0.4 11 5
Conditional Probabilities § A simple relation between joint and marginal probabilities § In fact, this is taken as the definition of a conditional probability P(a,b) P(a) P(b) T W P hot sun 0.4 hot rain 0.1 cold sun 0.2 cold rain 0.3 12 Bayes Rule P(coronavirus | sneezing) = ? 0.0000075 P(sneezing | coronavirus) = 0.75 P(sneezing) = 0.10 P(coronavirus) = 0.000001 P(coronavirus | sneezing, in-seattle) = ? 13 13 6
Probability Recap § Conditional probability § Product rule § Chain rule § Bayes rule § X, Y independent if and only if: § X and Y are conditionally independent given Z: if and only if: 14 Conditional Independence S = Smokes cigarettes S / D C = Has (or will have) lung cancer D = Early death S D | C Forall s,d,c P(s,d | c) = P(s | c)*P(d | c) 15 15 7
Probabilistic Inference § Probabilistic inference = “compute a desired probability from other known probabilities (e.g. conditional from joint)” § We generally compute conditional probabilities § P(on time | no reported accidents) = 0.90 § These represent the agent’s beliefs given the evidence § Probabilities change with new evidence: § P(on time | no accidents, 5 a.m.) = 0.95 § P(on time | no accidents, 5 a.m., raining) = 0.80 § Observing new evidence causes beliefs to be updated 16 Outline § Hidden Markov Models (HMMs) § A way to represent a class of probability distributions § Task of Filtering (aka Monitoring) § HMM Forward Algorithm for Filtering § HMM Particle Filter Representation & Algorithm for Filtering § Dynamic Bayes Nets § A generalization & improvement on HMMs 17 17 8
Filtering as “Probabilistic Inference” Stream of observations (evidence) at successive times: e 1 , e 2 , … Important Inference question: P(X t | e 1 , e 2 , … e t ) Deterministic vs. stochastic Fully observable vs. partially observable 18 18 Hidden Markov Models Cool representation for uncertain , sequential data § E.g., ghost locations over time in Pacman § E.g., characters on a line in OCR § E.g., words over time in speech recognition 19 19 9
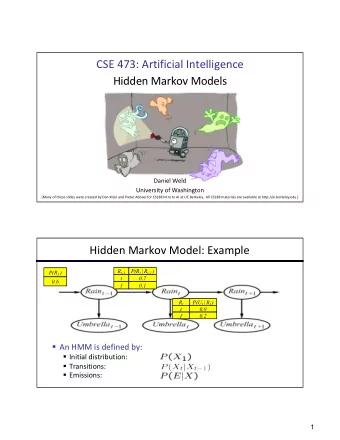
Hidden Markov Models X 1 X 2 X 3 X 4 X N X 5 E 1 E 2 E 3 E 4 E 5 E N Defines a joint probability distribution: 20 Hidden Markov Model: Example R t-1 P(R t | R t-1 ) P(R 1 ) t 0.7 0.6 f 0.1 R t P(U t | R t ) t 0.9 f 0.2 s c i m a n l § An HMM is defined by: e y d d o n m o n i e t o i v s § Initial distribution: i a n t a a h v r s t r e M y s r M a b § Transitions: o n H o y i t r a a t n S o § Observations: i t a t S Aka “evidence,” “emissions” 21 10
Remember: Joint Distributions § A joint distribution over a set of random variables: specifies a probability for each assignment (or outcome ): T W P § Must obey: hot sun 0.4 hot rain 0.1 cold sun 0.2 cold rain 0.3 § Size of joint distribution if n variables, each with domain sizes d? § d n For all but the smallest distributions, impractical to write out! 22 HMM Joint Distribution for T=100 X 1 E 1 X 2 E 2 X 3 E 3 … X 100 E 100 P T T T T T T T T 0.01 T T T T T T T F 0.007 … F F F F F F F F F 0.026 How Many Parameters? 23 23 11
Umbrella HMM Example: 5 Parameters R t-1 P(R t | R t-1 ) P(R 1 ) t 0.7 0.6 f 0.1 R t P(U t | R t ) t 0.9 f 0.2 s c i m a l n e § An HMM is defined by: y d d o m n o n i t o i § Initial distribution: s e i t n v a a a v h r r t e s y s M § Transitions: r b a M o n H o y r i t a a n t § Observations: S o i t a t S Aka “evidence,” “emissions” 24 Conditional Independence HMMs have two important independence properties: § Future independent of past given the present X t-1 X t+1 | X t ? ? X 1 X 2 X 3 X 4 E 1 E 1 E 3 E 4 Forall x t-1 , x t , x t+1 P(x t-1 , x t+1 | x t ) = P(x t-1 | x t )*P(x t+1 | x t ) 25 12
Conditional Independence HMMs have two important independence properties: § Future independent of past given the present § Current observation independent of all else given current state E t all | X t ? X 1 X 2 X 3 X 4 For example, … E 1 E 1 E 3 E 4 E t X t-1 | X t ? 26 Conditional Independence § HMMs have two important independence properties: § Markov hidden process, future depends on past via the present § Current observation independent of all else given current state X 1 X 2 X 3 X 4 E 1 E 1 E 3 E 4 ? ? § Quiz: does this mean that observations are independent given no evidence? § [ No , correlated by the hidden state, X 2 and X 3 ] 27 13
HMM Computations Given § parameters § evidence E 1:n =e 1:n Inference problems include: § Filtering, find P(X t |e 1:t ) for some t § Most probable explanation, for some t find x* 1:t = argmax x 1:t P(x 1:t |e 1:t ) § Smoothing, find P(X t |e 1:n ) for some t < n 28 Filtering (aka Monitoring) § The task of tracking the agent’s belief state, B(X), over time § B(X) = distribution over world states (outcomes); represents agent knowledge § We start with B(X) in an initial setting, usually uniform § As time passes, or we get evidence/observations, we update B(X) § Many algorithms for this: § Exact probabilistic inference § Particle filter approximation § Kalman filter (a method for handling continuous Real-valued random vars) § invented in the 60’for Apollo Program – real-valued state, Gaussian noise 29 14
Example of HMM Filtering Robot tracking: § States (X) are positions on a map (continuous) § Observations (E) are range readings (continuous) X 1 X 2 X 3 X 4 E 1 E 1 E 3 E 4 30 Example: Robot Localization Example from Michael Pfeiffer Prob 0 1 T=1 Sensor model: never more than 1 mistake Motion model: may not execute action with small prob. 31 15
Example: Robot Localization Green signal = obstacle detected Red signal = no obstacle detected Prob 0 1 At most one error! t=1 32 Example: Robot Localization Prob 0 1 t=2 33 16
Example: Robot Localization Prob 0 1 t=3 34 Example: Robot Localization Prob 0 1 t=4 35 17
Example: Robot Localization Prob 0 1 t=5 36 Other Real HMM Examples § Speech recognition HMMs: § States are specific positions in specific words (so, tens of thousands ) § Observations are acoustic signals (continuous valued) X 1 X 2 X 3 X 4 E 1 E 1 E 3 E 4 37 18
Other Real HMM Examples § Machine translation HMMs: § States are translation options § Observations are words (tens of thousands) X 1 X 2 X 3 X 4 E 1 E 1 E 3 E 4 38 Ghostbusters HMM § X = ghost location: x 11 , … x 33 x 13 x 23 x 33 § Ignore pacman location for now x 12 x 22 x 23 x 11 x 21 x 31 X 1 X 2 X 3 X 4 P(X 1 ) E 1 E 1 E 3 E 4 § How specify HMM? 39 19
Recommend
















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.