TDDC17 17: Introdu oduction ion to Automate mated d Planning - PowerPoint PPT Presentation
TDDC17 17: Introdu oduction ion to Automate mated d Planning nning Jonas Kvarnstrm Automated Planning Group Department of Computer and Information Science Linkping University jonas.kvarnstrom@liu.se 2020 1 2 You have done this
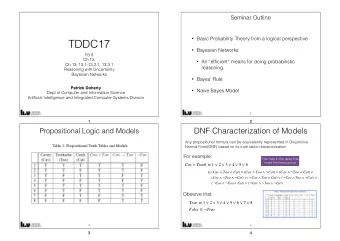
TDDC17 17: Introdu oduction ion to Automate mated d Planning nning Jonas Kvarnström Automated Planning Group Department of Computer and Information Science Linköping University jonas.kvarnstrom@liu.se – 2020 1 2 You have done this before! Using knowledge about the world, including possible actions and their results, One way of defining planning: to decide what to do and when in order to achieve an objective , before you actually start doing it Using knowledge about the world, including possible actions and their results, to decide what to do and when in order to achieve an objective , before you actually start doing it Are we done? 3 4
jonkv@ida jonkv@ida Domain-specific search guidance – too much (human) work! AI Planni nning: ng: A Simplified ified View 6 6 Description of Description of the world specific objectives + how we can to achieve affect it with actions Still simplified , because in reality: General planning algorithm, general heuristics There must be an agent that defines the objectives More complex ??? Solution : Multiple agents may plan, interact ➔ Plan with actions to perform, Automated Planning: Automated Planning: negotiation, delegation of tasks, ordering constraints, collaboration, competition, … General heuristics Entirely different search spaces … Pattern Databases, Landmarks Partial Order Causal Link Execution can fail ➔ feedback, FF, ℎ 𝑛 , merge-and-shrink, … SAT planning, Planning Graphs, … monitoring, replanning, plan repair Execution System ➔ More in TDDD48 ➔ More in TDDD48 And so on… Need a well-structured representation Sensors Actuators for planners/heuristics to analyse! 5 6 jonkv@ida jonkv@ida Fact ctsand Stat ates es: Introd roduct uction on 8 8 Like before, we are interested in s tates of the world The world is currently in this state We want to reach one of these states Is this information sufficient? No – Need to analyze states, The basis for most extended forms of automated planning find differences compared to goal states, find relevant actions, …! 7 8
jonkv@ida jonkv@ida Fact ctsand Stat ates: es: Introd roduct uction on 9 9 We need information about every state: The world is currently in this state Let’s use a representation based on first order logic! We want to reach one of these states Efficient planning depends on describing states as collections of facts : We are in a state where there is dirt in both rooms, and the vacuum cleaner is in the leftmost room 9 10 jonkv@ida jonkv@ida jonkv@ida jonkv@ida Exampl mple: e: Dock Worker er Robots ots (DWR) Objects ects 1: Object ect Types 11 11 12 12 Modern planners let us specify object types Containers shipped Cranes move containers A crane moves containers in and out of a harbor between ”piles” and robotic trucks between piles / robots A robot is an automated A container can be truck moving containers stacked, picked up, between locations loaded onto robots loc2 c2 c2 c2 p2 p2 c3 c3 c1 c1 r1 r1 p1 p1 loc1 c1 A pile is a stack of containers – A location is an area that can at the bottom, there is a pallet be reached by a single crane Can contain several piles, at most one robot. 11 12
jonkv@ida jonkv@ida jonkv@ida jonkv@ida Objects ects 2: Actual ual objects cts Fact cts 13 13 14 14 We then specify sets of actual objects Most planners use a first-order representation : ▪ Every fact is represented as a logical atom : Predicate symbol + arguments ▪ ▪ ▪ Properties of the world ▪ ▪ ▪ ▪ Properties of single objects … ▪ ▪ ▪ Relations between objects ▪ ▪ Relations between >2 objects ▪ loc2 loc2 c2 c2 c2 c2 c3 c3 c3 c3 p2 p2 p2 p2 c1 c1 c1 c1 r1 r1 r1 r1 loc1 Essential: Determine what is relevant for the problem and objective ! loc1 p1 p1 p1 p1 13 14 jonkv@ida jonkv@ida Fact cts s / Predicat icates es in DWR 15 15 Reference : All predicates for DWR, and their intended meaning "Fixed/Rigid" ▪ (don’t change) States "Dynamic" (modified by actions) 15 16
jonkv@ida jonkv@ida jonkv@ida jonkv@ida Stat ates es 1: Stat ate of the World ld Stat ates es 2: Effi ficient cientRepres resentat entation ion 17 17 18 18 A state (of the world) should specify exactly Efficient specification and storage for a single state : Ground = without which facts ( ground atoms ) are true/false in the world ▪ Specify which atoms are true variables at a given time ▪ All other atoms have to be false – what else would they be? ▪ ➔ A state of the world is specified as a set containing Can calculate all ground atoms all variable-free atoms that [are, were, will be] true in the world We know all predicates that exist: ▪ We know which objects exist These are the facts to keep track of! for each type We can find all possible states! Every assignment of true/false to the ground atoms is a distinct state ➔ ∈ Number of states: – enormous, but finite (for classical planning!) ∉ ➔ 17 18 jonkv@ida jonkv@ida jonkv@ida jonkv@ida Stat ates es 3: Initial ial State Stat ates es 4: GoalStates es 19 19 20 20 Initial states in classical planning : Classical planning: Reach one of possibly many goal states ▪ We assume complete information about the ▪ Can be specified as a set of literals that must hold Complete relative to the model : Literals = positive initial state 𝑡 0 (before any action) We must know everything or negated atoms about those predicates and objects we have specified... ▪ Example: Containers 1 and 3 should be in pile 2; But not whether it's raining ! ▪ So we can still use a set of true atoms container 12 should not be in pile 2 ▪ ▪ We don't care about their order, or any other fact ▪ loc2 loc2 c2 c2 c2 c2 c3 c3 c3 c3 p2 p2 p2 p2 c1 c1 c1 c1 r1 r1 r1 r1 loc1 loc1 p1 p1 p1 p1 19 20
jonkv@ida jonkv@ida Actions ons 1: Intro ro 22 22 Actions in plain search (lectures 2-3): ▪ Assumed a transition / successor function Actions, Operators ▪ But how to specify it succinctly ? 21 22 jonkv@ida jonkv@ida jonkv@ida jonkv@ida Actions ons 2: Operat ators rs Actions ons 3: Instances ances 23 23 24 24 Define operators or action schemas : The planner instantiates the schemas ▪ Applies them to objects of the correct type ▪ ▪ ∧ The action is applicable ▪ ∧ in a state s ▪ ∧ ¬ if its precond is true in s ∧ ¬ ▪ The result of applying the ¬ action in state s : ▪ ¬ s – {negated effect facts} ¬ + {positive effect facts} ¬ 23 24
jonkv@ida jonkv@ida jonkv@ida jonkv@ida Actions ons 4: Step p by Step Plannin ning g Domain, n, Problem lem Instance ance 25 25 26 26 In classical planning (the basic, limited form): We know the initial Each action corresponds to one state update state Split knowledge into two parts Planning Domain Problem Instance We know how states are changed by actions ▪ General properties ▪ Specific problem to solve The solution to the problem ▪ There are containers , cranes , … ▪ Which containers and cranes exist? will be a sequence of actions ➔ Deterministic , can completely predict the state of the world after a sequence of actions! ▪ Each object has a location ▪ Where is everything? ▪ Possible actions: ▪ Where should everything be? Pick up container, put down (More general: container, drive to location , … What should we achieve?) 25 26 jonkv@ida jonkv@ida Stat ate Spaces es1: Introd roduct uction on 28 28 Every classical planning problem has a state space – a graph ▪ A node for every world state ▪ An edge for every executable action The planning problem: Find a path (not necessarily shortest) We assume an initial state: And a number of goal states ("no dirt"): Example solutions: SRS, RSLS, LRLRLSSSRLRS, … 27 28
jonkv@ida jonkv@ida jonkv@ida jonkv@ida Stat ate Spaces es 2: Intuit itions? ons? Stat ate Spaces es 3: ToH, Actio ions ns 29 29 30 30 A classical solution plan is Now that we have a general model of facts: Initial/current state an action sequence ▪ Every combination of facts is a state Facts are like taking you from the Towers of Hanoi ▪ { at(robot1,loc1), at(robot1, loc2) } ”variables” that can init state to a goal state disks, pegs independently be ▪ { adjacent(loc1, loc2) } states reachable ➔ [but not adjacent(loc2, loc1)!] true or false! from the initial state But our intuitions often identify states that we think are: ▪ ”Normal” ▪ ”Expected” ▪ ”Physically possible” Usually: ▪ The initial state is ”normal” ▪ We never specify { at(robot1,loc1), at(robot1, loc2) } ▪ Preconditions/effects ensure that we can only reach other ”normal” states Goal state ▪ Mainly need to care about ”normal” states… so let’s focus on those! 29 30 jonkv@ida jonkv@ida jonkv@ida jonkv@ida Stat ate Spaces es 4: Large ger r Exampl mple Stat ate Spaces es 5: Blocks ks World ld 31 31 32 32 Larger state space – interesting symmetry You Current state of the world Your greatest desire ▪ 7 disks ▪ 2187 “possible” states ▪ 6558 transitions, [state, action] → state – takes x from the table – block x is on block y ▪ ▪ – puts x on the table – x is on the table – takes x from on top of ?y – we can place a block on x ▪ ▪ – puts x on top of y – the robot is holding block x – the robot arm is free 31 32
Recommend
![TDDC17 16 Frelsningar 6 Labs (1) Introduction to AI [Doherty] Intelligent](https://c.sambuz.com/752064/tddc17-s.webp)





More recommend
Explore More Topics
Stay informed with curated content and fresh updates.