Optimizing Dynamic Power Flow Anders Rantzer Automatic Control LTH - PowerPoint PPT Presentation
Optimizing Dynamic Power Flow Anders Rantzer Automatic Control LTH Lund Universty Anders Rantzer Optimizing Dynamic Power Flow Combine with water power reservoirs in northern Sweden Use wind farms to stabilize network AEOLUS project:
Optimizing Dynamic Power Flow Anders Rantzer Automatic Control LTH Lund Universty Anders Rantzer Optimizing Dynamic Power Flow
Combine with water power reservoirs in northern Sweden Use wind farms to stabilize network AEOLUS project: Distributed coordination of wind turbines Anders Rantzer Optimizing Dynamic Power Flow
Outline Problem Statements • ○ Positive Quadratic Programming ○ Optimizing Static Power Flow ○ Dynamic Positive Programming ○ Optimizing Dynamic Power Flow Anders Rantzer Optimizing Dynamic Power Flow
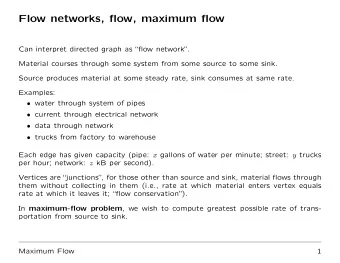
A Power Transmission Network I 1 I 4 V 1 V 4 I 3 I 2 V 2 V 3 I 1 ( s ) Y 12 + Y 14 − Y 12 − Y 14 V 1 ( s ) 0 I 2 ( s ) − Y 21 Y 21 + Y 23 + Y 24 − Y 23 − Y 24 V 2 ( s ) = I 3 ( s ) 0 − Y 32 Y 32 0 V 3 ( s ) I 4 ( s ) − Y 41 − Y 42 Y 41 + Y 42 V 4 ( s ) 0 � �� � � �� � � �� � I ( s ) Y ( s ) V ( s ) Potential differences drive currents (voltage*current = power) Price differences drive commodity flows (price*amount = value) Anders Rantzer Optimizing Dynamic Power Flow
An Optimal Flow Problem for AC Power I 1 I 4 V 1 V 4 I k ∈ C V k ∈ C I 3 I 2 V 2 V 3 Re � k I ∗ Minimize k V k P k ≤ Re ( I ∗ subject to I = YV and k V k ) ≤ P k Q k ≤ Im ( I ∗ k V k ) ≤ Q k v k ≤ � V k � ≤ v k for k = 1,...,4 (Convex relaxation by Lavaei/Low inspired this talk.) Anders Rantzer Optimizing Dynamic Power Flow
Problem I: Optimizing Static Power Flow i 1 i 4 v 1 v 4 i k ∈ R v k ∈ R i 3 i 2 v 2 v 3 � Minimize k i k v k subject to i = Yv and i k v k ≤ p k ( v k − v j ) 2 ≤ c kj v k ≤ v k ≤ v k for all k , j Notice: p k negative at loads, positive at generators. Motivation: 1) Real DC networks. 2) Approximation of AC. 3) Water tanks. 4) Supply chains Anders Rantzer Optimizing Dynamic Power Flow
Further questions regarding Problem I Are there distributed solution algorithms? Will market mechanisms find the optimum? Optimize transition when demand changes! (Problem II) Anders Rantzer Optimizing Dynamic Power Flow
Problem II: Optimizing Dynamic Power Flow i 1 i 4 v 1 v 4 i k ( t ) ∈ R v k ( t ) ∈ R i 3 i 2 v 2 v 3 � ∞ � Minimize 0 i k ( t ) v k ( t ) dt k subject to I ( s ) = Y ( s ) V ( s ) and i k ( t ) v k ( t ) ≤ p k � v k ( t ) − v j ( t )� 2 ≤ c kj v k ≤ v k ( t ) ≤ v k for all k , j Convexly solvable when off-diagonal elements of Y ( s ) have non-negative impulse response! (e.g. ramp dynamics) Anders Rantzer Optimizing Dynamic Power Flow
Outline ○ Problem Statements Positive Quadratic Programming • ○ Optimizing Static Power Flow ○ Dynamic Positive Programming ○ Optimizing Dynamic Power Flow Anders Rantzer Optimizing Dynamic Power Flow
Positive Quadratic Programming Given A 0 ,..., A K ∈ R n � n with nonnegative off-diagonal entries and b 1 ,..., b K ∈ R , the following equality holds: x T A 0 x max = max trace ( A 0 X ) x ∈ R n subject to subject to X � 0 + x T A k x ≥ b k trace ( A k X ) ≥ b k k = 1,..., K k = 1,..., K Proof � x 1 � 2 ∗ ... If X = maximizes the right hand side, � x n � 2 ∗ x 1 . . then x = maximizes the left. . x n [Kim/Kojima, 2003] Anders Rantzer Optimizing Dynamic Power Flow
Positive Quadratic Programming Given A 0 ,..., A K ∈ R n � n with nonnegative off-diagonal entries and b 1 ,..., b K ∈ R , the following equality holds: x T A 0 x max = max trace ( A 0 X ) x ∈ R n subject to subject to X � 0 + x T A k x ≥ b k trace ( A k X ) ≥ b k k = 1,..., K k = 1,..., K Proof � x 1 � 2 ∗ ... If X = maximizes the right hand side, � x n � 2 ∗ x 1 . . then x = maximizes the left. . x n [Kim/Kojima, 2003] Anders Rantzer Optimizing Dynamic Power Flow
Outline ○ Problem Statements ○ Positive Quadratic Programming Optimizing Static Power Flow • ○ Dynamic Positive Programming ○ Optimizing Dynamic Power Flow Anders Rantzer Optimizing Dynamic Power Flow
An Optimal Flow Problem for DC Power i 1 i 4 v 1 v 4 i 3 i 2 v 2 v 3 Minimize i 3 v 3 + i 4 v 4 subject to i = Yv and i 1 v 1 ≤ p 1 i 2 v 2 ≤ p 2 v k ≤ v k ≤ v k for k = 1,...,4 Anders Rantzer Optimizing Dynamic Power Flow
An Optimal Flow Problem for DC Power i 1 i 4 v 1 v 4 i 3 i 2 v 2 v 3 Minimize (− y 32 v 2 + y 32 v 3 ) v 3 + (− y 41 v 1 − y 42 v 2 + y 41 v 4 + y 42 v 4 ) v 4 ( y 12 v 1 + y 14 v 1 − y 12 v 2 − y 14 v 4 ) v 1 ≤ p 1 subject to (− y 21 v 1 + y 21 v 2 + y 23 v 2 + y 24 v 2 − y 23 v 3 − y 24 v 4 ) v 2 ≤ p 2 � v k � 2 ≤ � v k � 2 ≤ � v k � 2 Note: The problem is convex in � v 1 � 2 ,..., � v 4 � 2 ! Anders Rantzer Optimizing Dynamic Power Flow
An Optimal Flow Problem for DC Power i 1 i 4 v 1 v 4 i 3 i 2 v 2 v 3 Minimize (− y 32 v 2 + y 32 v 3 ) v 3 + (− y 41 v 1 − y 42 v 2 + y 41 v 4 + y 42 v 4 ) v 4 ( y 12 v 1 + y 14 v 1 − y 12 v 2 − y 14 v 4 ) v 1 ≤ p 1 subject to (− y 21 v 1 + y 21 v 2 + y 23 v 2 + y 24 v 2 − y 23 v 3 − y 24 v 4 ) v 2 ≤ p 2 � v k � 2 ≤ � v k � 2 ≤ � v k � 2 Note: The problem is convex in � v 1 � 2 ,..., � v 4 � 2 ! Anders Rantzer Optimizing Dynamic Power Flow
Dual Positive Quadratic Programming Given A 0 ,..., A K ∈ R n � n with nonnegative off-diagonal entries and b 1 ,..., b K ∈ R , the following equality holds: x T A 0 x − � max = min k λ k b k x ∈ R n subject to subject to λ 1 ,..., λ K ≥ 0 + x T A k x ≥ b k 0 � A 0 + � k λ k A k k = 1,..., K Interpretation: In the power flow example, λ k is the price of power at node k . Anders Rantzer Optimizing Dynamic Power Flow
Dual Positive Quadratic Programming Given A 0 ,..., A K ∈ R n � n with nonnegative off-diagonal entries and b 1 ,..., b K ∈ R , the following equality holds: x T A 0 x − � max = min k λ k b k x ∈ R n subject to subject to λ 1 ,..., λ K ≥ 0 + x T A k x ≥ b k 0 � A 0 + � k λ k A k k = 1,..., K Interpretation: In the power flow example, λ k is the price of power at node k . Anders Rantzer Optimizing Dynamic Power Flow
Dual Positive Quadratic Programming Given A 0 ,..., A K ∈ R n � n with nonnegative off-diagonal entries and b 1 ,..., b K ∈ R , the following equality holds: − � x T A 0 x max = min k λ k b k x ∈ R n subject to subject to λ 1 ,..., λ K ≥ 0 + x T A k x ≥ b k 0 � A 0 + � k λ k A k k = 1,..., K Distributed solution: The agent at node k bying power over node jk compares prices at both ends and adjusts for power losses in the link. Anders Rantzer Optimizing Dynamic Power Flow
Outline ○ Problem Statements ○ Positive Quadratic Programming ○ Optimizing Static Power Flow Dynamic Positive Programming • ○ Optimizing Dynamic Power Flow Anders Rantzer Optimizing Dynamic Power Flow
Positive systems have nonnegative impulse response If the matrices A , B , C and D have nonnegative coefficients except for the diagonal of A , then the system dx dt = Ax + Bu y = Cx + Du has non-negative impulse response. Example: L di dt = − Ri + v inductive transmission line y = i Anders Rantzer Optimizing Dynamic Power Flow
Positive systems have nonnegative impulse response If the matrices A , B , C and D have nonnegative coefficients except for the diagonal of A , then the system dx dt = Ax + Bu y = Cx + Du has non-negative impulse response. Example: dv dt = − α v + u generator ramp dynamics y = v Anders Rantzer Optimizing Dynamic Power Flow
Positive systems Suppose the matrices A , B , C and D have nonnegative coefficients except for the diagonal of A : dx dt = Ax + Bu y = Cx + Du Properties: Stability verified by linear or diagonal Lyapunov functions. Maximal gain for zero frequency: � C ( i ω I − A ) − 1 B + D � = � D − CA − 1 B � max ω Anders Rantzer Optimizing Dynamic Power Flow
Dynamic Positive Programming Let A 0 ( s ) ,..., A K ( s ) have off-diagonal entries with nonnegative impulse response and b 1 ,..., b K ∈ R . Then the following equality holds: � ∞ −∞ x ( i ω ) ∗ A 0 ( i ω ) x ( i ω ) d ω max � ∞ −∞ x ( i ω ) ∗ A k ( i ω ) x ( i ω ) d ω ≥ b k subject to x ∈ H n + , k = 1,..., K � ∞ = max −∞ trace ( A 0 X ) d ω � ∞ subject to −∞ trace ( A k X ) d ω ≥ b k X ( i ω ) � 0, k = 1,..., K where H n + consists of all stable transfer functions with nonnegative impulse response. Anders Rantzer Optimizing Dynamic Power Flow
Positive Quadratic Programming Let A 0 ( s ) ,..., A K ( s ) have off-diagonal entries with nonnegative impulse response and b 1 ,..., b K ∈ R . Then the following equality holds: � ∞ � ∞ −∞ x ∗ A 0 xd ω max = max −∞ trace ( A 0 X ) d ω x ∈ H n X � 0 subject to subject to + � ∞ � ∞ −∞ x ∗ A k xd ω ≥ b k −∞ trace ( A k X ) d ω ≥ b k k = 1,... , K k = 1,... , K Proof � x 1 � 2 ∗ ... If X = maximizes the right hand side, � x n � 2 ∗ x 1 . . then x = maximizes the left. . x n Anders Rantzer Optimizing Dynamic Power Flow
Recommend




![COMMUNICATING [with empathy] @ DY DYNAMIC JILL JILL @ DY DYNAMIC JILL TENSION IS INEVITABLE @](https://c.sambuz.com/548934/communicating-s.webp)





More recommend
Explore More Topics
Stay informed with curated content and fresh updates.