Image Analysis System Example: Image Classification System pre - PDF document
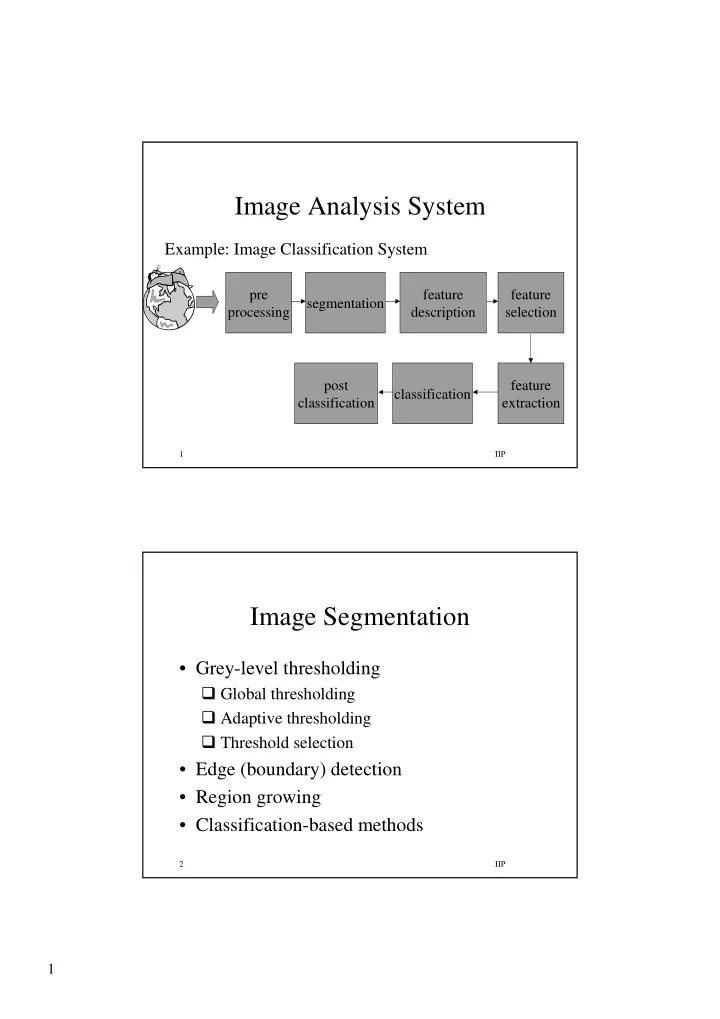
Image Analysis System Example: Image Classification System pre feature feature segmentation processing description selection post feature classification classification extraction 1 IIP Image Segmentation Grey-level thresholding
Image Analysis System Example: Image Classification System pre feature feature segmentation processing description selection post feature classification classification extraction 1 IIP Image Segmentation • Grey-level thresholding � Global thresholding � Adaptive thresholding � Threshold selection • Edge (boundary) detection • Region growing • Classification-based methods 2 IIP 1
Grey-Level Thresholding (1) • Global thresholding ≥ 1 if ( , ) I x y t = ( , ) O t x y < 0 if ( , ) I x y t generalized to ∈ 1 if ( , ) I x y z = ( , ) O z x y 0 otherwise 3 IIP Gray-Level Thresholding (2) • One global threshold is usually difficult to find • Other than global thresholds are sometimes needed 4 IIP 2
Gray-Level Thresholding (3) • Multiple global thresholds (via non-linear machine learning) • Also, adaptive thresholding (a different threshold for each large region having a bimodal histogram) • Threshold selection 5 IIP Edge Detection (1) – Differentiation in contrast to thresholding • Directional derivative extracting characteristic gray level range or some δ = − − f ( i , j ) f ( i , j ) f ( i 1 , j ) x uniformity, edge detection δ = − − ( , ) ( , ) ( , 1 ) f i j f i j f i j looks for discontinuities in y gray level or texture, i.e., border points to be tracked 6 IIP 3
Edge Detection (2) – Laplacian in a noisy ∇ = + + − 2 f ( i , j ) f ( i 1 , j ) f ( i 1 , j ) image perform + + + − − a low-pass ( , 1 ) ( , 1 ) 4 ( , ) f i j f i j f i j filter before the Laplacian 0 -1 0 -1 -1 -1 -1 4 -1 -1 8 -1 0 -1 0 -1 -1 -1 Laplacian convolution kernels 7 IIP Edge Detection (3) – Template Matching (1) Two characteristics : � Slope � Direction -1 -1 -1 1 0 -1 0 0 0 1 0 -1 Prewitt Prewitt & Sobel are 1 1 1 1 0 -1 edge operators producing an edge -1 -2 -1 -1 0 1 magnitude image 0 0 0 -2 0 2 that is thresholded Sobel 1 2 1 -1 0 1 8 IIP 4
Edge Detection (4) – Template Matching (2) • Sobel operator 9 IIP Edge Detection (5) – Template Matching (3) • Other common detectors line detector finds lines 2 -1 -1 5 5 -3 in different orientation -1 2 -1 5 0 -3 Kirsch edge operator -1 -1 2 -3 -3 -3 responds maximally to an edge oriented in a line detector Kirsch edge operator particular general (e.g., -45 degrees) direction 10 IIP 5
Edge Detection (6) – Boundary Chain Code following edge detection Storing segmentation result we link edges, generally � Start point + directions (3 bits) using thresholding the � Compactness edges or boundary tracking methods (boundary defines an object) � Interior points discarded (not suitable if further processing is necessary) 11 IIP Region Growing (1) divide image into tiny regions (even pixels); define properties in each region (e.g., average gray-level); define boundaries by property values – large difference indicates strong boundary that stands while weak boundary dissolves and regions are merged; repeat for larger regions until no boundaries are weak enough to be dissolved → regions grow and merged until correspond with objects • Utilises several properties simultaneously • Suitable for natural scenes where strong a priori knowledge is not available • Computationally intensive 12 IIP 6
Castleman, 1996 Region Growing (2) – Illustration 13 IIP Binary Image Processing (IP) • Morphological image processing (MIP) (a set of binary IP operations developed from a set- theoretical approach mainly for correcting unsatisfactory initial segmentation) • Operations can be concatenated producing complex operators • Passing a structuring element (composes of 1’s and 0’s) over the image performing logical operation between the two (similar to convolution) • Facilitate IP (e.g., pre-processing, computing shape properties) 14 IIP 7
Gonzalez & Woods, 2002 Logic Operations (pixel-by-pixel) 15 IIP MIP (1) – Dilation (1) A boundary incorporating into the object point is a pixel that is located all the background points that inside an object touch it, leaving it larger in but that has at area by that amount. least one (4 or 8) neighbor outside objects that are separated by the object less than three pixels become connected. useful for filling holes in the segmented objects. } { } { ˆ ˆ ⊕ = ∩ ≠ ∅ = ∩ ⊆ | ( ) | ( ) A B z B A z B A A z z { } ˆ = = − ∈ , sets; | , for - reflection; - shift A B B w w b b B z 16 IIP 8
Gonzalez & MIP (2) – Dilation (2) Woods, 2002 note: recall the convolution operation 17 IIP Gonzalez & Woods, 2002 MIP (3) – Dilation (3) 18 IIP 9
MIP (1) – Erosion (1) A boundary point is a pixel that is located eliminating all the boundary points inside an object but that has at from an object, leaving the object least one (4 or 8) smaller in area by one pixel all neighbor outside around its perimeter. the object narrowing to less than 3 pixels thick → disconnection → useful for removing from a segmented image objects that are too small to be of interest. { } ⊗ = ⊆ | ( ) z A B z B A 19 IIP Gonzalez & Woods, 2002 MIP (2) – Erosion (2) 20 IIP 10
Gonzalez & Woods, 2002 MIP (3) – Erosion (3) an example of opening 21 IIP Matlab IP Toolbox, Mathworks Inc. Morphological IP (2) – Matlab (1) 22 IIP 11
Matlab IP Toolbox, Mathworks Inc. Morphological IP (3) – Matlab (2) 23 IIP Castleman, 1996 Morphological IP (4) – Thinning vs. Skeletonization Thinning – pixels candidates for removal (due to erosion) are removed only if not destroying connectivity thinning Skeletonization (MAT) – locus of centers of all circles tangent to the boundary at two or more disjoint points thinning skeleton- ization 24 IIP 12
Classification-Driven Segmentation (1) • Avoiding threshold selection • Modeling of shape or curvature is unnecessary • Avoiding excessive heuristics • Example: classification-driven partially occluded object segmentation (CPOOS) 25 IIP Lerner et al ., 1998 CPOOS (2) A flow chart of the CPOOS method 26 IIP 13
Lerner et al ., 1998 CPOOS (3) application to human chromosome image segmentation 27 IIP Lerner et al ., 1998 CPOOS (4) different hypotheses 28 IIP 14
Lerner et al ., 1998 CPOOS (5) scoring hypotheses 29 IIP Lerner et al ., 1998 CPOOS (6) performance evaluation 30 IIP 15
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.