How to drive a DC Motor Corrado Santoro ARSLAB - Autonomous and - PowerPoint PPT Presentation
How to drive a DC Motor Corrado Santoro ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Universit` a di Catania, Italy santoro@dmi.unict.it L. S. M. Course Corrado Santoro DC Motor Driving
How to drive a DC Motor Corrado Santoro ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Universit` a di Catania, Italy santoro@dmi.unict.it L. S. M. Course Corrado Santoro DC Motor Driving
Electric Motors An Electric Motor is a machine that transforms electric energy into mechanical energy This is obtained by exploiting some magnetic properties of materials and electric current There are different kind of electric motors DC Motors (DC=direct current) or brushed motors AC Motors (AC=alternate current) or brushless motors Special brushless motors ( stepper motors ) Corrado Santoro DC Motor Driving
Electric Motors Any electric motor is made of two parts: Stator , a static part Rotor , the part which is made rotating thus generating the mechanical energy One of the two parts is made of permanent magnets The other part is made of coils of copper wire that generate magnetic field when the electric current flows The rotation is generated by the contrast of the magnetic fields generated by the stator and the rotor In order to ensure rotation, the magnetic field must change continuously The angular velocity of the motor is proportional to the intensity of the magnetic field which, in turn, is proportional to the voltage applied to the motor Corrado Santoro DC Motor Driving
Direct Current (Brushed) Motor In a direct current motor : the stator is the external container , it is made by permanent magnets the rotor is a set of copper wire coils A system of “brushes” (crawling contacts) are able to continuously change the polarity of the voltage applied to the coils, thus causing the continuous inversion of the magnetic field Corrado Santoro DC Motor Driving
DC Driving - H Bridge The basics of DC motor driving is made of an electronic based on four electronic switches (transistor MOSFET) A , B , C , D connected as in figure The configuration is called H-bridge because it has the shape of the letter “H” Corrado Santoro DC Motor Driving
Clock-wise and Counter-clock-wise rotation By activating switches A e D , the current will flow in the direction depicted at the left → motor will rotate clock-wise By activating switches B e C , the current will flow in the direction depicted at the right (opposite to the previous case) → the motor will rotate counter-clock-wise Corrado Santoro DC Motor Driving
Modulating rotation speed In order to modulate the speed of the rotor, we must change the voltage applied to the motor As in any other power system, the technique used is based on a periodic sequence of power-on and power-off of the motor This is made possible by using a Pulse Width Modulation=PWM signal Corrado Santoro DC Motor Driving
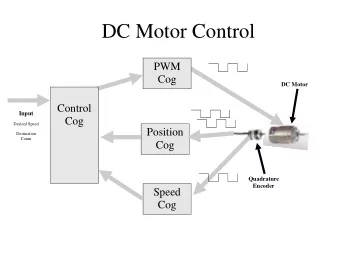
Connecting a DC Motor to a Microcontroller The H-bridge is implemented in a integrated circuit called DC motor driver It acts a an interface between the microcontroller (logic part) and the power part , usually at high voltages (12V and above) The MCU has only to provide a PWM Signal and a Direction signal V Motor + PWM DC Motor Microcontroller Driver Motor (with H-Bridge) Direction 0 = CW 1 = CCW V Motor - Corrado Santoro DC Motor Driving
Connecting a DC Motor to a Microcontroller The H-bridge is implemented in a integrated circuit called DC motor driver It acts a an interface between the microcontroller (logic part) and the power part , usually at high voltages (12V and above) The MCU has only to provide a PWM Signal and a Direction signal V Motor + PWM DC Motor Dir1, CW Microcontroller Driver Motor (with H-Bridge) Dir2, CCW V Motor - CW → Dir1=1, Dir2=0 CCW → Dir1=0, Dir2=1 STOP → Dir1=0, Dir2=0 Corrado Santoro DC Motor Driving
DC Motor Control Reading Speed and Position Corrado Santoro DC Motor Driving
Encoder Electric motors can have a position sensor called encoder An encoder translates the angular position of the axis in a numeric value (properly scaled) Encoders can be: Resistive Optical Magnetic Corrado Santoro DC Motor Driving
Optical Encoders An optical encoder is made of a disc with a set of holes (e.g. 500, 1000, 2000, etc.) that rotates with the motor axis In the area of the holes, there are a LED and a photodiode that can detected holes Disc rotation causes the photodiode to generate a burst of pulses : the higher the rotation speed, the higher the frequency of the pulse signal The pulse signal is connected to a hardware interface that can count the generated pulses thus providing the numeric value to the software in a proper variable Corrado Santoro DC Motor Driving
Encoders and measures Optical encoder can determine: angular position , by counting “ticks” Speed , by computing the tick difference between two subsequent time instant, divided by the time interval However, it cannot determine the rotation direction Corrado Santoro DC Motor Driving
Quadrature Encoders An optical quadrature encoder is made of a disc with two concentric series of holes There are two pairs LED/photodiode , called channels “A” e “B” The holes are displaced of “half a tick” (see figure) Corrado Santoro DC Motor Driving
Quadrature Encoders The “half tick” displacement causes a different generation of the pulses in the channel A and B, on the basis of rotation direction CW or CCW The signal sequences generated on channels A and B are: CW: AB = 01 → 11 → 10 → 00 → 01 → 11 → . . . CCW: AB = 01 → 00 → 10 → 11 → 01 → 00 → . . . Corrado Santoro DC Motor Driving
Quadrature Encoders Hardware interfaces for this type of sensors are called QEI - Quadrature Encoder Interface These interfaces identify the different sequences: CW: AB = 01 → 11 → 10 → 00 → 01 → 11 → . . . CCW: AB = 01 → 00 → 10 → 11 → 01 → 00 → . . . The counter value is incremented if CW decremented if CCW Corrado Santoro DC Motor Driving
QEI Interface and STM32 STM32 MCU provide a QEI mode for TIMERS The QEI mode is a particular functionality of the Capture Circuit In each timer, Channels 1 and 2 can be configured in QEI Mode In QEI Mode, signals from Channels 1 and 2 are “interpreted by the hardware” and the value of the CNT register is properly incremented or decremented TIMx_CH1 QEI Circuit CNT TIMx_CH2 Corrado Santoro DC Motor Driving
How to drive a DC Motor Corrado Santoro ARSLAB - Autonomous and Robotic Systems Laboratory Dipartimento di Matematica e Informatica - Universit` a di Catania, Italy santoro@dmi.unict.it L. S. M. Course Corrado Santoro DC Motor Driving
Recommend









More recommend
Explore More Topics
Stay informed with curated content and fresh updates.