
Disparity map computation on Cell Ondej Korotvika - PowerPoint PPT Presentation
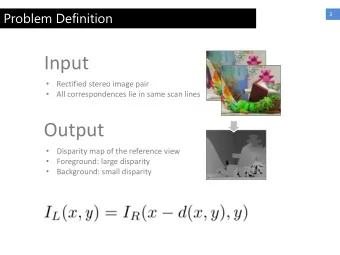
IBM - CVUT Student Research Projects Disparity map computation on Cell Ondej Korotvika (koroto1@fel.cvut.cz) What is disparity map left eye Used for right eye stereoscopic vision depth map
IBM - CVUT Student Research Projects Disparity map computation on Cell Ondřej Korotvička (koroto1@fel.cvut.cz)
What is disparity map ● left eye Used for right eye ● stereoscopic vision ● ● depth map ● ● ● near far source images from: vision.stanford.edu/~birch IBM - CVUT Student Research Projects 2
Computation • Try shifting the window to find best match between left and right windows • • left image right image IBM - CVUT Student Research Projects 3
IBM - CVUT Student Research Projects 4
Implementation on Cell • PPE loads images from file to main memory • Until SPE processed whole image – SPE loads unprocessed rows of images to local memory – Compute disparity on local data – Store results back to main memory • PPE writes disparity map to file IBM - CVUT Student Research Projects 5
Findings and problems • Computation intensive – no speedup with double buffering • Problem with access to images (dimension is not multiples of 128) • Problem with unaligned access to pixels • Problems with large untextured regions (better algorithm – not solved) IBM - CVUT Student Research Projects 6
Achieved results • • • 5x faster GCC -O3 -funroll-loops IBM - CVUT Student Research Projects 7
Conclusion • Implement algorithm on PC • Port algorithm to one SPE – Vectorizing of calculation (processing 9 pixels at once) – Double buffering • Checked results against PC • Future: run on 6 SPE IBM - CVUT Student Research Projects 8
● ● near ● ● ● ● ● ● ● ● ● far IBM - CVUT Student Research Projects 9
• • near • • • • • • • • • far IBM - CVUT Student Research Projects 10
Thank you for your attention IBM - CVUT Student Research Projects 11
Recommend










More recommend
Explore More Topics
Stay informed with curated content and fresh updates.