Digital Signal Processing measured quantity that varies with time - PowerPoint PPT Presentation
Signals flow of information Digital Signal Processing measured quantity that varies with time (or position) electrical signal received from a transducer (microphone, thermometer, accelerometer, antenna, etc.) electrical signal that
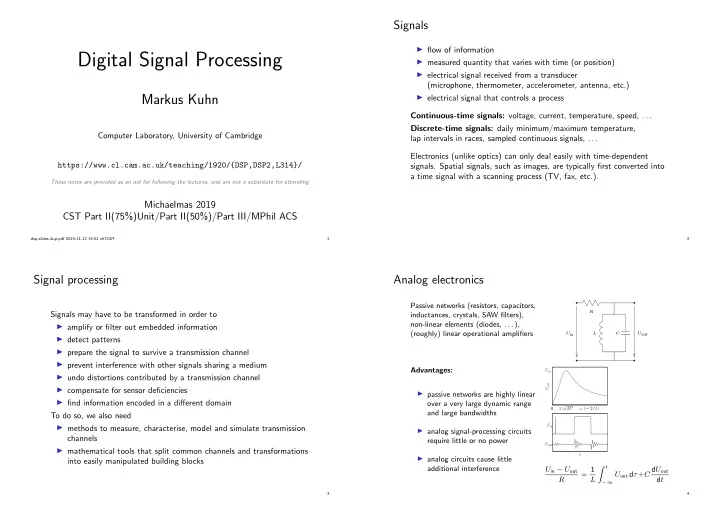
Signals ◮ flow of information Digital Signal Processing ◮ measured quantity that varies with time (or position) ◮ electrical signal received from a transducer (microphone, thermometer, accelerometer, antenna, etc.) ◮ electrical signal that controls a process Markus Kuhn Continuous-time signals: voltage, current, temperature, speed, . . . Discrete-time signals: daily minimum/maximum temperature, Computer Laboratory, University of Cambridge lap intervals in races, sampled continuous signals, . . . Electronics (unlike optics) can only deal easily with time-dependent https://www.cl.cam.ac.uk/teaching/1920/{DSP,DSP2,L314}/ signals. Spatial signals, such as images, are typically first converted into a time signal with a scanning process (TV, fax, etc.). These notes are provided as an aid for following the lectures, and are not a substitute for attending Michaelmas 2019 CST Part II(75%)Unit/Part II(50%)/Part III/MPhil ACS dsp-slides-4up.pdf 2019-11-12 15:52 e67247f 1 2 Signal processing Analog electronics Passive networks (resistors, capacitors, R Signals may have to be transformed in order to inductances, crystals, SAW filters), non-linear elements (diodes, . . . ), ◮ amplify or filter out embedded information (roughly) linear operational amplifiers U in L C U out ◮ detect patterns ◮ prepare the signal to survive a transmission channel ◮ prevent interference with other signals sharing a medium Advantages: U in ◮ undo distortions contributed by a transmission channel U out ◮ compensate for sensor deficiencies ◮ passive networks are highly linear ◮ find information encoded in a different domain over a very large dynamic range √ 0 1 / LC ω (= 2 π f ) and large bandwidths To do so, we also need ◮ methods to measure, characterise, model and simulate transmission U in ◮ analog signal-processing circuits channels require little or no power U out ◮ mathematical tools that split common channels and transformations t ◮ analog circuits cause little into easily manipulated building blocks � t additional interference U in − U out = 1 U out d τ + C d U out R L d t −∞ 3 4
Digital signal processing Some DSP applications Analog/digital and digital/analog converter, CPU, DSP, ASIC, FPGA. communication systems geophysics Advantages: seismology, oil exploration modulation/demodulation, channel ◮ noise is easy to control after initial quantization equalization, echo cancellation astronomy consumer electronics ◮ highly linear (within limited dynamic range) VLBI, speckle interferometry perceptual coding of audio and video (DAB, ◮ complex algorithms fit into a single chip transportation DVB, DVD), speech synthesis, speech recognition radar, radio navigation ◮ flexibility, parameters can easily be varied in software music security ◮ digital processing is insensitive to component tolerances, aging, synthetic instruments, audio effects, noise steganography, digital watermarking, biometric environmental conditions, electromagnetic interference reduction identification, surveillance systems, signals intelligence, electronic warfare But: medical diagnostics engineering ◮ discrete-time processing artifacts (aliasing) magnetic-resonance and ultrasonic imaging, X-ray computed tomography, ECG, EEG, MEG, control systems, feature extraction for pattern ◮ can require significantly more power (battery, cooling) AED, audiology recognition, sensor-data evaluation ◮ digital clock and switching cause interference 5 6 Objectives Textbooks By the end of the course, you should be able to ◮ R.G. Lyons: Understanding digital signal processing. 3rd ed., ◮ apply basic properties of time-invariant linear systems Prentice-Hall, 2010. ( £ 68) ◮ understand sampling, aliasing, convolution, filtering, the pitfalls of ◮ A.V. Oppenheim, R.W. Schafer: Discrete-time signal processing. 3rd spectral estimation ed., Prentice-Hall, 2007. ( £ 47) ◮ explain the above in time and frequency domain representations ◮ J. Stein: Digital signal processing – a computer science perspective. Wiley, 2000. ( £ 133) ◮ use filter-design software ◮ S.W. Smith: Digital signal processing – a practical guide for ◮ visualise and discuss digital filters in the z -domain engineers and scientists. Newness, 2003. ( £ 48) ◮ use the FFT for convolution, deconvolution, filtering ◮ K. Steiglitz: A digital signal processing primer – with applications to ◮ implement, apply and evaluate simple DSP applications in MATLAB digital audio and computer music. Addison-Wesley, 1996. ( £ 67) ◮ apply transforms that reduce correlation between several signal sources ◮ Sanjit K. Mitra: Digital signal processing – a computer-based ◮ understand the basic principles of several widely-used modulation and approach. McGraw-Hill, 2002. ( £ 38) image-coding techniques. 7 8
Sequences and systems Some simple sequences A discrete sequence { x n } ∞ n = −∞ is a sequence of numbers u n 1 Unit-step sequence: . . . , x − 2 , x − 1 , x 0 , x 1 , x 2 , . . . � 0 , n < 0 where x n denotes the n -th number in the sequence ( n ∈ Z ). A discrete u n = sequence maps integer numbers onto real (or complex) numbers. 1 , n ≥ 0 We normally abbreviate { x n } ∞ n = −∞ to { x n } , or to { x n } n if the running index is not obvious. . . . − 3 − 2 − 1 0 1 2 3 . . . The notation is not well standardized. Some authors write x [ n ] instead of x n , others x ( n ). n Where a discrete sequence { x n } samples a continuous function x ( t ) as δ n x n = x ( t s · n ) = x ( n/f s ) , Impulse sequence: 1 we call t s the sampling period and f s = 1 /t s the sampling frequency . � 1 , n = 0 A discrete system T receives as input a sequence { x n } and transforms it δ n = into an output sequence { y n } = T { x n } : 0 , n � = 0 = u n − u n − 1 discrete . . . , x 2 , x 1 , x 0 , x − 1 , . . . . . . , y 2 , y 1 , y 0 , y − 1 , . . . . . . − 3 − 2 − 1 0 1 2 3 . . . n system T 9 10 Sinusoidial sequences Properties of sequences A cosine wave, amplitude A , frequency f , phase offset ϕ : A sequence { x n } is x ( t ) = A · cos( 2 π ft + ϕ ) periodic ⇔ ∃ k > 0 : ∀ n ∈ Z : x n = x n + k � �� � phase Is a continuous function with period t p still periodic after sampling? Sampling it at sampling rate f s results in the discrete sequence { x n } : ∞ � x n = A · cos(2 π fn/f s + ϕ ) = A · cos( ˙ ωn + ϕ ) absolutely summable ⇔ | x n | < ∞ n = −∞ where ˙ ω = 2 π f/f s is the frequency expressed in radians per sample. ∞ � | x n | 2 MATLAB/Octave example: square summable ⇔ < ∞ ⇔ “energy signal” n = −∞ 1 � �� � n=0:40; fs=8000; 0.8 “energy” f=400; x=cos(2*pi*f*n/fs); 0.6 k 1 � 0.4 | x n | 2 stem(n, x); ylim([-1.1 1.1]) 0 < lim < ∞ ⇔ “power signal” 0.2 1 + 2 k k →∞ This shows 41 samples ( ≈ 1 / 200 s = 5 ms) n = − k 0 of an f = 400 Hz sine wave, sampled at � �� � −0.2 “average power” f s = 8 kHz. −0.4 Exercise: Try f = 0, 1000, 2000, 3000, 4000, −0.6 This energy/power terminology reflects that if U is a voltage supplied to a load 5000 Hz. Try negative f . Try sine instead of co- −0.8 resistor R , then P = UI = U 2 /R is the power consumed, and � P ( t ) d t the energy. It sine. Try adding phase offsets ϕ of ± π / 4, ± π / 2, −1 is used even if we drop physical units (e.g., volts) for simplicity in calculations. and ± π . 0 5 10 15 20 25 30 35 40 11 12
Recommend












More recommend
Explore More Topics
Stay informed with curated content and fresh updates.