Computer Vision Computer Vision Samer M Abdallah, PhD Faculty of - PowerPoint PPT Presentation
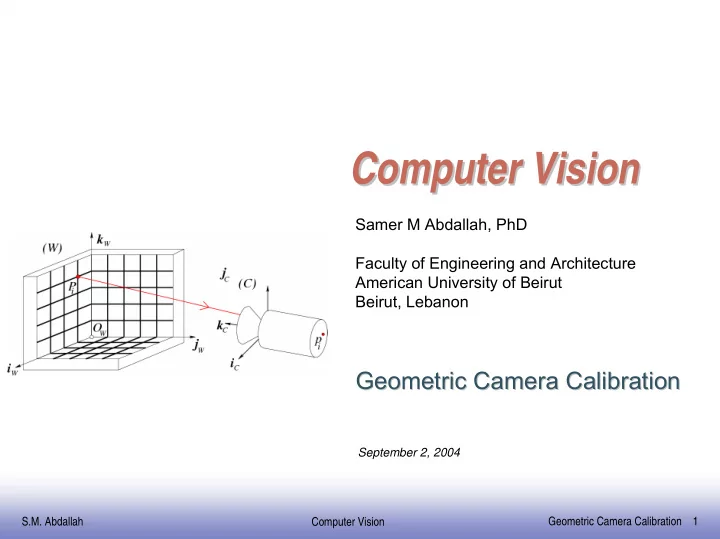
Computer Vision Computer Vision Samer M Abdallah, PhD Faculty of Engineering and Architecture American University of Beirut Beirut, Lebanon Geometric Camera Calibration Geometric Camera Calibration September 2, 2004 1 EE141 Geometric
Computer Vision Computer Vision Samer M Abdallah, PhD Faculty of Engineering and Architecture American University of Beirut Beirut, Lebanon Geometric Camera Calibration Geometric Camera Calibration September 2, 2004 1 EE141 Geometric Camera Calibration 1 S.M. Abdallah Computer Vision
Series outline Series outline � Cameras and lenses � Geometric camera models � Geometric camera calibration � Stereopsis 2 EE141 Geometric Camera Calibration 2 S.M. Abdallah Computer Vision
Lecture outline Lecture outline � The calibration problem � Least-square technique � Calibration from points � Radial distortion � A note on calibration patterns 3 EE141 Geometric Camera Calibration 3 S.M. Abdallah Computer Vision
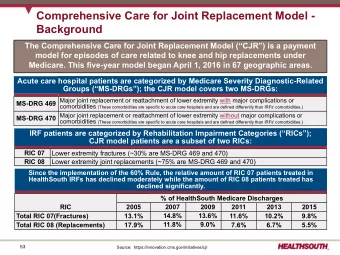
Camera calibration Camera calibration Camera calibration is determining the intrinsic and extrinsic parameters of the camera. The are three coordinate systems involved: image, camera, and world. Key idea: to write the projection equations linking the known coordinates of a set of 3-D points and their projections, and solve for the camera parameters. 4 EE141 Geometric Camera Calibration 4 S.M. Abdallah Computer Vision
Projection matrix Projection matrix M is only defined up to scale in this setting. 5 EE141 Geometric Camera Calibration 5 S.M. Abdallah Computer Vision
The calibration problem The calibration problem 6 EE141 Geometric Camera Calibration 6 S.M. Abdallah Computer Vision
Linear systems Linear systems Square system: = x b A � Unique solution � Gaussian elimination Rectangular system: = x b A � underconstrained: Infinity of solutions � Overconstrained: no solution Minimize |Ax-b| 2 7 EE141 Geometric Camera Calibration 7 S.M. Abdallah Computer Vision
How do you solve overconstrained linear equations? How do you solve overconstrained linear equations? 8 EE141 Geometric Camera Calibration 8 S.M. Abdallah Computer Vision
Homogeneous linear equations Homogeneous linear equations Square system: = x 0 A � Unique solution = 0 � Unless Det( A ) = 0 Rectangular system: = x 0 A 0 is always a solution � Minimize |Ax| 2 under the constraint |x| 2 = 1 9 EE141 Geometric Camera Calibration 9 S.M. Abdallah Computer Vision
How do you solve overconstrained homogeneous linear equations? How do you solve overconstrained homogeneous linear equations? The solution is the eigenvector e 1 with least eigenvalue of U T U . 10 EE141 Geometric Camera Calibration 10 S.M. Abdallah Computer Vision
Example: Line fitting Example: Line fitting Problem: minimize with respect to ( a,b,d ). • Minimize E with respect to d : • Minimize E with respect to a,b : and where 11 EE141 Geometric Camera Calibration 11 S.M. Abdallah Computer Vision
Estimation of the projection matrix Estimation of the projection matrix The constraints associated with the n points yield a system of 2 n homogeneous linear equations in the 12 coefficients of the matrix M, When n ≥ 6, homogeneous linear least-square can be used to compute the value of the unit vector m (hence the matrix M ) that minimizes | P m | 2 as the solution of an eigenvalue problem. The solution is the eigenvector with least eigenvalue of P T P. 12 EE141 Geometric Camera Calibration 12 S.M. Abdallah Computer Vision
Estimation of the intrinsic and extrinsic parameters Estimation of the intrinsic and extrinsic parameters Once M is known, you still got to recover the intrinsic and extrinsic parameters! This is a decomposition problem, NOT an estimation problem. ρ � Intrinsic parameters � Extrinsic parameters 13 EE141 Geometric Camera Calibration 13 S.M. Abdallah Computer Vision
Estimation of the intrinsic and extrinsic parameters Estimation of the intrinsic and extrinsic parameters Write M = ( A, b ), therefore Using the fact that the rows of a rotation matrix have unit length and are perpendicular to each other yields and 14 EE141 Geometric Camera Calibration 14 S.M. Abdallah Computer Vision
Estimation of the intrinsic and extrinsic parameters Estimation of the intrinsic and extrinsic parameters 15 EE141 Geometric Camera Calibration 15 S.M. Abdallah Computer Vision
Taking radial distortion into account Taking radial distortion into account Assuming that the image centre is known ( u 0 = v 0 = 0), model the projection process as: ⎛ 1 0 0 ⎞ λ ⎜ ⎟ 1 0 1 0 = ⎜ λ ⎟ p M P z ⎜ ⎟ 0 0 1 ⎝ ⎠ where λ is a polynomial function of the squared distance d 2 between the image centre and the image point p . It is sufficient to use low-degree polynomial: q ∑ 2 1 , with 3 and the distortion coefficien ts ( 1 , , ) p λ = + κ ≤ κ = K d q p q p p 1 = p 2 2 2 ˆ ˆ = + d u v This yields highly nonlinear constraints on the q + 11 camera parameters. 16 EE141 Geometric Camera Calibration 16 S.M. Abdallah Computer Vision
Calibration pattern Calibration pattern The accuracy of the calibration depends on the accuracy of the measurements of the calibration pattern. 17 EE141 Geometric Camera Calibration 17 S.M. Abdallah Computer Vision
Line intersection and point sorting Line intersection and point sorting � Extract and link edges using Canny; � Fit lines to edges using orthogonal regression; � Intersect lines. 18 EE141 Geometric Camera Calibration 18 S.M. Abdallah Computer Vision
References References � “Computer Vision: A Modern Approach”. D. Forsyth and J. Ponce, Prentice Hall, 2003 � “Introductory Techniques for 3-D Computer Vision”. E. Trucco and A. Verri, Prentice Hall, 2000 � “Geometric Frame Work for Vision – Lecture Notes”. A. Zisserman, University of Oxford 19 EE141 Geometric Camera Calibration 19 S.M. Abdallah Computer Vision
Recommend

















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.