Computer Graphics (CS 543) Lecture 5 (part 2): Projection (Part 2): - PowerPoint PPT Presentation
Computer Graphics (CS 543) Lecture 5 (part 2): Projection (Part 2): Derivation Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI) Parallel Projection normalization find 4x4 matrix to transform user specified
Computer Graphics (CS 543) Lecture 5 (part 2): Projection (Part 2): Derivation Prof Emmanuel Agu Computer Science Dept. Worcester Polytechnic Institute (WPI)
Parallel Projection normalization find 4x4 matrix to transform user ‐ specified view volume to canonical view volume (cube) User ‐ specified View Volume Canonical View Volume glOrtho (left, right, bottom, top,near, far)
Parallel Projection: Ortho Parallel projection: 2 parts Translation: centers view volume at origin 1.
Parallel Projection: Ortho Scaling: reduces user ‐ selected cuboid to canonical 2. cube (dimension 2, centered at origin)
Parallel Projection: Ortho Translation lines up midpoints: E.g. midpoint of x = (right + left)/2 Thus translation factors: ‐ (right + left)/2, ‐ (top + bottom)/2, ‐ (far+near)/2 Translation matrix: 1 0 0 ( right left ) / 2 0 1 0 ( top bottom ) / 2 0 0 1 ( far near ) / 2 0 0 0 1
Parallel Projection: Ortho Scaling factor: ratio of ortho view volume to cube dimensions Scaling factors: 2/(right ‐ left), 2/(top ‐ bottom), 2/(far ‐ near) Scaling Matrix M2: 2 0 0 0 right left 2 0 0 0 top bottom 2 0 0 0 far near 0 0 0 1
Parallel Projection: Ortho Concatenating Translation x Scaling , we get Ortho Projection matrix 2 0 0 0 1 0 0 ( right left ) / 2 right left 2 0 1 0 ( top bottom ) / 2 0 0 0 X top bottom 0 0 1 ( far near ) / 2 2 0 0 0 far near 0 0 0 1 0 0 0 1 2 right left 0 0 right left right left 2 top bottom 0 0 top bottom top bottom P = ST = 2 far near 0 0 near far far near 0 0 0 1
Final Ortho Projection Set z =0 Equivalent to the homogeneous coordinate transformation 1 0 0 0 0 1 0 0 M orth = 0 0 0 0 0 0 0 1 Hence, general orthogonal projection in 4D is P = M orth ST
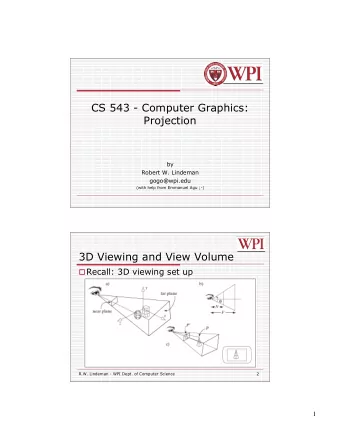
Perspective Projection Projection – map the object from 3D space to 2D screen y z x Perspective( ) Frustrum ( )
Perspective Projection: Classical Projectors Object in 3 space Projected image VRP COP Projection plane y (x,y,z) Based on similar triangles: (x’,y’,z’) (0,0,0) y’ N = y -z - z + z -N N y’ = y x -z -z Eye (COP) Near Plane (VOP)
Perspective Projection: Classical So (x*,y*) projection of point, (x,y,z) unto near plane N is given as: Projectors Object in 3 space N N Projected image *, * , x y x y z z VRP COP Numerical example: Q. Where on the viewplane does P = (1, 0.5, ‐ 1.5) lie for a near plane at N = 1? N N 1 1 x *, y * x , y 1 , 0 . 5 ( 0 . 666 , 0 . 333 ) 1 . 5 1 . 5 z z
Pseudodepth Classical perspective projection projects (x,y) coordinates to (x*, y*), drops z coordinates Map to sam e ( x* ,y* ) Projectors Com pare their z values? Object in 3 space Projected image (0,0,0) VRP z COP But we need z to find closest object (depth testing)!!!
Perspective Transformation Perspective transformation maps actual z distance of perspective view volume to range [ –1 to 1] ( Pseudodepth ) for canonical view volume Actual view volum e W e w ant perspective Actual depth Transform ation and NOT classical projection!! Near Far Canonical view volum e Pseudodepth Set scaling z Pseudodepth = az + b Next solve for a and b 1 -1
Perspective Transformation We want to transform viewing frustum volume into canonical view volume (1, 1, -1) y z (-1, -1, 1) x Canonical View Volume
Perspective Transformation using Pseudodepth N az b N x *, y *, z * x , y , z z z Choose a, b so as z varies from Near to Far , pseudodepth varies from –1 to 1 (canonical cube) Actual view volum e Boundary conditions Actual depth z* = ‐ 1 when z = ‐ N Z z* = 1 when z = ‐ F Near Far Pseudodepth Canonical view volum e Z* -1 1
Transformation of z: Solve for a and b Solving: az b z * z Use boundary conditions z* = ‐ 1 when z = ‐ N………(1) z* = 1 when z = ‐ F………..(2) Set up simultaneous equations aN b 1 N aN b ........( 1 ) N aF b 1 F aF b ........( 2 ) F
Transformation of z: Solve for a and b N aN b ........( 1 ) F aF b ........( 2 ) Multiply both sides of (1) by ‐ 1 N aN b ........( 3 ) Add eqns (2) and (3) F N aN aF F N ( F N ) a .........( 4 ) N F F N Now put (4) back into (3)
Transformation of z: Solve for a and b Put solution for a back into eqn (3) N aN b ........( 3 ) N ( F N ) N b F N ( ) N F N b N F N 2 2 N ( F N ) N ( F N ) NF N NF N 2 NF b F N F N F N So ( F N ) 2 FN a b F N F N
What does this mean? Original point z in original view volume, transformed into z* in canonical view volume Actual view Original volum e az b vertex z value * z z Near Far where ( F N ) a Transform ed F N Canonical view vertex z* value volum e 2 FN b F N -1 1
Homogenous Coordinates Want to express projection transform as 4x4 matrix Previously, homogeneous coordinates of P = (Px,Py,Pz) => (Px,Py,Pz,1) Introduce arbitrary scaling factor, w, so that P = (wPx, wPy, wPz, w) ( Note: w is non ‐ zero) For example, the point P = (2,4,6) can be expressed as (2,4,6,1) or (4,8,12,2) where w=2 or (6,12,18,3) where w = 3, or…. To convert from homogeneous back to ordinary coordinates, first divide all four terms by w and discard 4 th term
Perspective Projection Matrix Recall Perspective Transform N az b N x *, y *, z * x , y , z z z We have: N az b N y * y x * x z * z z z In matrix form: N x N 0 0 0 wx wNx z N 0 N 0 0 wy wNy y z 0 0 a b wz w ( az b ) az b 0 0 1 0 w wz z 1 Perspective Transform ed Original Transform ed Vertex Transform Matrix Vertex vertex after dividing by 4 th term
Perspective Projection Matrix N x N 0 0 0 wP wNP z x x N 0 N 0 0 wP wNP y y y z 0 0 a b wP w ( aP b ) az b z z 0 0 1 0 wP w z z 1 ( F N ) 2 FN a b F N F N In perspective transform matrix, already solved for a and b : So, we have transform matrix to transform z values
Perspective Projection Not done yet!! Can now transform z! Also need to transform the x = (left, right) and y = (bottom, top) ranges of viewing frustum to [ ‐ 1, 1] Similar to glOrtho, we need to translate and scale previous matrix along x and y to get final projection transform matrix we translate by y –(right + left)/2 in x top ‐ (top + bottom)/2 in y Scale by: 2/(right – left) in x 2/(top – bottom) in y x 1 -1 bottom right left
Perspective Projection Translate along x and y to line up center with origin of CVV –(right + left)/2 in x ‐ (top + bottom)/2 in y Multiply by translation matrix: 1 0 0 ( right left ) / 2 y 0 1 0 ( top bottom ) / 2 top 0 0 1 0 0 0 0 1 x Line up centers 1 -1 Along x and y bottom right left
Recommend





More recommend
Explore More Topics
Stay informed with curated content and fresh updates.