Z -transform Modeling Systems and Processes (11MSP) Bohumil Kov a - PowerPoint PPT Presentation
Matehematical tools Z -transform Z -transform Modeling Systems and Processes (11MSP) Bohumil Kov a r, Jan P rikryl, Miroslav Vl cek Department of Applied Mahematics CTU in Prague, Faculty of Transportation Sciences 7th lecture 11MSP
Matehematical tools Z -transform Z -transform Modeling Systems and Processes (11MSP) Bohumil Kov´ aˇ r, Jan Pˇ rikryl, Miroslav Vlˇ cek Department of Applied Mahematics CTU in Prague, Faculty of Transportation Sciences 7th lecture 11MSP Tuesday, April 16th 2019 verze: 2019-04-15 13:29
Matehematical tools Z -transform Table of content 1 Matehematical tools Motivation Usage 2 Z -transform
Matehematical tools Z -transform Mathematical tools Motivation We want to analyze the behavior of some system, or to design a system that has exactly specified parameters. We use • physical model , based on physical laws • black-box model , based on observation, identification Analysis of the real system behavior is a complex process (the model represents one or more differential or difference equations of higher order ) ⇒ numerical solution. How to analysis simplify?
Matehematical tools Z -transform Mathematicla tools Usage System design or analysis in time domain (inputs and outputs are function of time) are very laborious. Conversion to the frequency domain (inputs and outputs are a function of a complex variable called angular frequency ) provides us • a fundamentally different tool to understand the function of the system • often drastically reduces the complexity of mathematical calculations needed for system analysis.
Matehematical tools Z -transform Table of content 1 Matehematical tools 2 Z -transform About the origin of discrete transformation Definition Properties Z -transform tables
Matehematical tools Z -transform About the origin of discrete transformation How a continuous-time system becomes discrete f ( t ) t
Matehematical tools Z -transform About the origin of discrete transformation How a continuous-time system becomes discrete f ( t ) t
Matehematical tools Z -transform About the origin of discrete transformation How a continuous-time system becomes discrete f [ n ] n
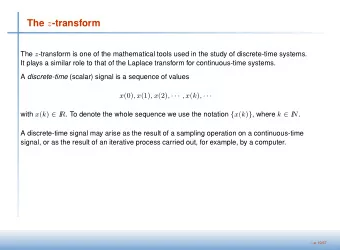
Matehematical tools Z -transform About the origin of discrete transformation Signal sampling The relation between the continuous function f ( t ) and the ideally sampled function f ∗ ( t ) can be formally written as � ∞ ∞ ∞ � � f ∗ ( t ) = f ( t ) ∗ δ ( t − nT ) = f ( τ ) · δ ( t − nT − τ ) d τ −∞ n =0 n =0 = f ( nT ) δ ( t − nT ) ≡ { f n } ∞ n =0 , where T is the signal sampling period. From a continuous function f : R → R becomes the sequence of real values f n : N → R . In this sequence, it is customary not to provide a signal sampling period. We denote it f [ n ] and f [ n ] = { f ( nT ) } ∞ n =0 .
Matehematical tools Z -transform About the origin of discrete transformation Signal sampling If we are looking for the Laplace transform of f ∗ ( t ), we get � ∞ L { f ∗ ( t ) } = f ∗ ( t ) e − pt dt 0 � ∞ ∞ � f ( t ) δ ( t − nT ) e − pt dt = 0 n =0 � ∞ ∞ � δ ( t − nT ) f ( t ) e − pt dt = 0 n =0 ∞ ∞ f ( nT ) e − pnT ≡ � � f [ n ] z − n , = n =0 n =0 where we introduced a complex variable z = e pT and f [ n ] denotes the n -th sample of the corresponding continuous function sampled with period T .
Matehematical tools Z -transform Z -transform Definition Definition ( Z -transform) Z -transform of the sequence f [ n ] it is defined by an infinite series ∞ � f [ n ] z − n , F ( z ) = n =0 which we often refer to F ( z ) = Z { f [ n ] } . The inverse-transformation has the form of an integral along the closed curve C , which contains all the singular points of the F ( z ). For all n = 0 , 1 , . . . , ∞ 1 � F ( z ) z n − 1 d z ≡ Z − 1 { F ( z ) } . f [ n ] = 2 π i C
Matehematical tools Z -transform Properties of the Z -transform Linearity Theorem (Linearity) Z -transform is linear: �� � � Z a k f k [ n ] = a k Z { f k [ n ] } k k �� � b m Z − 1 { F m ( z ) } Z − 1 � b m F m ( z ) = m m
Matehematical tools Z -transform Properties of the Z -transform Scaling in the z-domain Theorem (Scaling in the z-domain) For F ( z ) = Z { f [ n ] } is a − n f [ n ] = Z − 1 { F ( az ) } F ( a − 1 z ) = Z { a n f [ n ] }
Matehematical tools Z -transform Properties of the Z -transform Time delay The time delay (or advance) theorems are very important for transforming difference equations into algebraic equations in the Z -plane similarly to derivatives theorem of Laplace transform for continuous-time systems. Z { f [ n − m ] } = z − m Z { f [ n ] } = z − m F ( z ) | ∀ n − m < 0: f [ n − m ]=0 � m − 1 � � Z { f [ n + m ] } = z m f [ ν ] z − ν Z { f [ n ] } − ν =0 � m − 1 � = z m � f [ ν ] z − ν F ( z ) − ν =0
Matehematical tools Z -transform Properties of the Z -transform Partial sum transformation Theorem (Partial sum transformation) Partial sum of sequence f [ n ] can be transformed as � n � z � Z f [ ν ] = z − 1 F ( z ) ν =0 � n − 1 � 1 � Z f [ ν ] = z − 1 F ( z ) ν =0
Matehematical tools Z -transform Properties of the Z -transform Transformation of forward diference For m = 1 , 2 , . . . , ∞ a diference of m -th order is ∆ 0 f [ n ] = f [ n ] , ∆ 1 f [ n ] = f [ n + 1] − f [ n ] , ∆ 2 f [ n ] = ∆ 1 � ∆ 1 f [ n ] � = f [ n + 2] − 2 f [ n + 1] + f [ n ] ∆ m f [ n ] = ∆ 1 � ∆ m − 1 f [ n ] � The Z - transformations of first two difererences are: ∆ 1 f [ n ] � � Z = ( z − 1) F ( z ) − f [0] z ∆ 2 f [ n ] = ( z − 1) 2 F ( z ) − f [0] z ( z − 1) + ∆ 1 f [0] z � � Z
Matehematical tools Z -transform Properties of the Z -transform Convolution Theorem (Convolution) If F ( z ) = Z { f [ n ] } and G ( z ) = Z { g [ n ] } then, for the discrete convolution of both sequences � ∞ � � Z { f [ n ] ∗ g [ n ] } = Z f [ n − m ] · g [ m ] = F ( z ) · G ( z ) m =0
Matehematical tools Z -transform Properties of the Z -transform Differentiation Theorem (Properties of the Z -transform) Simple differentiation of F ( z ) will take effect on the source function f [ n ] as multiplication by variable n: Z { nf [ n ] } = − z dF ( z ) dz
Matehematical tools Z -transform Z -transform tables f [ n ] = Z − 1 { F ( z ) } F ( z ) = Z { f [ n ] } δ [ n ] 1 1 1 [ n ] 1 − z − 1 1 a n 1 − a · z − 1 z − 1 n (1 − z − 1 ) 2 z − 1 n · a n − 1 (1 − az − 1 ) 2
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.