Wiener Filter Example Haykin 4e Ch. 2 Problems 11, 12 and beyond Eric Dubois School of Electrical Engineering and Computer Science University of Ottawa October 2012 Eric Dubois (EECS) Wiener Filter Example Haykin 4e Ch. 2 Problems 11, 12 and beyond October 2012 1 / 12
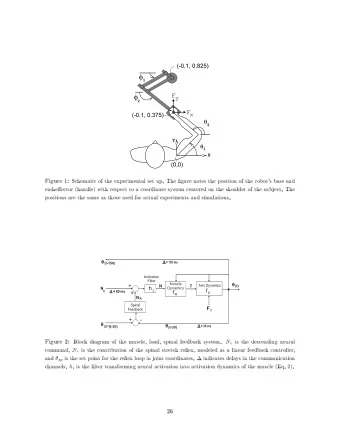
Problem Setup The desired signal is passed through a noisy communication channel: The desired signal is distorted by a filter with transfer function √ 1 H 2 ( z ) = | z | > | c 2 | , c 2 = . 05 + . 8025 ≈ . 9458 1 − c 2 z − 1 v 2 ( n ) is zero-mean white noise uncorrelated with d . S v 2 ( z ) = σ 2 2 = 0 . 1 Eric Dubois (EECS) Wiener Filter Example Haykin 4e Ch. 2 Problems 11, 12 and beyond October 2012 2 / 12
The Desired Signal The desired signal is assumed to be the realization of an AR(1) process The synthesis filter is given by √ 1 H 1 ( z ) = | z | > | c 1 | , c 1 = . 05 − . 8025 ≈ − . 8458 1 − c 1 z − 1 The white noise input is given by S v 1 ( z ) = σ 2 1 = 0 . 27 Eric Dubois (EECS) Wiener Filter Example Haykin 4e Ch. 2 Problems 11, 12 and beyond October 2012 3 / 12
Autocorrelation Function of the Desired Signal Recall that r d ( n ) = r v 1 ( n ) ∗ h 1 ( n ) ∗ h 1 ( − n ). Taking z-transforms S d ( z ) = S v 1 ( z ) H 1 ( z ) H ∗ 1 (1 / z ∗ ) = S v 1 ( z ) H 1 ( z ) H 1 ( z − 1 ) (since h 1 is real) σ 2 1 1 = | c 1 | < | z | < (1 − c 1 z − 1 )(1 − c 1 z ) | c 1 | � �� � . 8458 < | z | < 1 . 1823 r d ( n ) is the inverse z-transform of S d ( z ). For n ≥ 0 r d ( n ) = res[ S d ( z ) z n − 1 , z = c 1 ] � � σ 2 1 z n = res ( z − c 1 )(1 − c 1 z ) , z = c 1 = σ 2 1 c n 1 1 − c 2 1 Eric Dubois (EECS) Wiener Filter Example Haykin 4e Ch. 2 Problems 11, 12 and beyond October 2012 4 / 12
Autocorrelation Function of the Desired Signal (2) Since the process is real, r d ( − n ) = r d ( n ), and inserting the value of c 1 r d ( n ) = 0 . 9488( − 0 . 8458) | n | σ 2 d = 0 . 9488 Eric Dubois (EECS) Wiener Filter Example Haykin 4e Ch. 2 Problems 11, 12 and beyond October 2012 5 / 12
Autocorrelation Function of the Observed Signal Since v 2 ( n ) and d ( n ) (and so x ( n )) are uncorrelated r u ( n ) = r x ( n ) + r v 2 ( n ) S u ( z ) = S x ( z ) + S v 2 ( z ) = S d ( z ) H 2 ( z ) H 2 ( z − 1 ) + 0 . 1 σ 2 1 = (1 − c 1 z − 1 )(1 − c 1 z )(1 − c 2 z − 1 )(1 − c 2 z ) + 0 . 1 The region of convergence is 1 | c 2 | < | z | < | c 2 | 0 . 9458 < | z | < 1 . 0573 r u ( n ) is the inverse z-transform of S u ( z ), using your preferred method (partial fraction, residue theorem, etc.). Eric Dubois (EECS) Wiener Filter Example Haykin 4e Ch. 2 Problems 11, 12 and beyond October 2012 6 / 12
Autocorrelation Function of the Observed Signal (2) For n ≥ 0 r u ( n ) = res[ S x ( z ) z n − 1 , z = c 1 ] + res[ S x ( z ) z n − 1 , z = c 2 ] + 0 . 1 δ ( n ) � � σ 2 1 z n +1 = res ( z − c 1 )(1 − c 1 z )( z − c 2 )(1 − c 2 z ) , z = c 1 + � � σ 2 1 z n +1 res ( z − c 1 )(1 − c 1 z )( z − c 2 )(1 − c 2 z ) , z = c 2 + 0 . 1 δ ( n ) 1 c n +1 1 c n +1 σ 2 σ 2 1 2 = 1 )( c 1 − c 2 )(1 − c 1 c 2 ) + (1 − c 2 ( c 2 − c 1 )(1 − c 1 c 2 )(1 − c 2 2 ) + 0 . 1 δ ( n ) Thus, using symmetry of r u ( n ), and the values of the parameters, r u ( n ) = 0 . 2488( − 0 . 8458) | n | + 0 . 7512(0 . 9458) | n | + 0 . 1 δ ( n ) Eric Dubois (EECS) Wiener Filter Example Haykin 4e Ch. 2 Problems 11, 12 and beyond October 2012 7 / 12
Cross-correlation Between Observed and Desired Signals Since v 2 ( n ) and d ( n ) are uncorrelated r du ( n ) = r dx ( n ) ∞ � = E[ D ( m ) h 2 ( ℓ ) D ( m − n − ℓ )] ℓ =0 ∞ � = h 2 ( ℓ ) r d ( n + ℓ ) ℓ =0 It follows that S du ( z ) = S d ( z ) H 2 ( z − 1 ) σ 2 1 1 = (1 − c 1 z − 1 )(1 − c 1 z )(1 − c 2 z ) , | c 1 | < | z | < | c 2 | Eric Dubois (EECS) Wiener Filter Example Haykin 4e Ch. 2 Problems 11, 12 and beyond October 2012 8 / 12
Cross-correlation Between Observed and Desired Signals Using our preferred inverse z-transform method, for n ≥ 0, r du ( n ) = res[ S du ( z ) z n − 1 , z = c 1 ] � � σ 2 1 z n = res ( z − c 1 )(1 − c 1 z )(1 − c 2 z ) , z = c 1 σ 2 1 c n 1 = (1 − c 2 1 )(1 − c 1 c 2 ) = 0 . 5271( − 0 . 8458) n With these results, we can build the matrices R M and p M to solve for the FIR Wiener filter of any order M . Eric Dubois (EECS) Wiener Filter Example Haykin 4e Ch. 2 Problems 11, 12 and beyond October 2012 9 / 12
Correlation matrix R 5 and correlation vector p 5 1 . 1000 0 . 5000 0 . 8500 0 . 4850 0 . 7285 0 . 5000 1 . 1000 0 . 5000 0 . 8500 0 . 4850 R 5 = 0 . 8500 0 . 5000 1 . 1000 0 . 5000 0 . 8500 0 . 4850 0 . 8500 0 . 5000 1 . 1000 0 . 5000 0 . 7285 0 . 4850 0 . 8500 0 . 5000 1 . 1000 � � p T 5 = 0 . 5271 − 0 . 4458 0 . 3771 − 0 . 3190 0 . 2698 Eric Dubois (EECS) Wiener Filter Example Haykin 4e Ch. 2 Problems 11, 12 and beyond October 2012 10 / 12
Wiener Filters for M from 1 to 7 w0 = 0.4792 Jmin = 0.6962 w0 = 0.8362 -0.7854 Jmin = 0.1579 w0 = 0.7378 -0.8033 0.1378 Jmin = 0.1498 w0 = 0.7438 -0.6992 0.1527 -0.1470 Jmin = 0.1405 w0 = 0.7404 -0.6999 0.1370 -0.1495 0.0256 Jmin = 0.1402 w0 = 0.7407 -0.6962 0.1376 -0.1324 0.0282 -0.0279 Jmin = 0.1399 w0 = 0.7405 -0.6962 0.1370 -0.1325 0.0253 -0.0283 0.0047 Jmin = 0.1399 Eric Dubois (EECS) Wiener Filter Example Haykin 4e Ch. 2 Problems 11, 12 and beyond October 2012 11 / 12
Eigenvalue-eigenvector decomposition of the correlation matrix R 5 0 . 4597 0 . 3277 − 0 . 7019 − 0 . 0854 − 0 . 4257 0 . 4175 − 0 . 5706 − 0 . 0854 0 . 7019 0 . 0116 Q = 0 . 4782 0 . 3662 0 . 0000 − 0 . 0000 0 . 7983 0 . 4175 − 0 . 5706 0 . 0854 − 0 . 7019 0 . 0116 0 . 4597 0 . 3277 0 . 7019 0 . 0854 − 0 . 4257 3 . 6073 0 0 0 0 0 1 . 0633 0 0 0 Λ = 0 0 0 . 3733 0 0 0 0 0 0 . 2482 0 0 0 0 0 0 . 2079 Q T Q = I Q T RQ = Λ Eric Dubois (EECS) Wiener Filter Example Haykin 4e Ch. 2 Problems 11, 12 and beyond October 2012 12 / 12
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries
![Benchmark Problems Wiener Approaches - Coupled Electric Drives - Wiener Neural Identification [1]](https://c.sambuz.com/884414/benchmark-problems-wiener-approaches-s.webp)