
1
Lecture 9: Numerical Algorithms and Pipelining
2
Numerical Algorithms
- Solve big linear equation systems
– Dense – Sparse
- Optimization
- Iterative methods
- FFT
etc.
3
BLAS Level 1, 2, and 3
- BLAS 1
– operates on vectors (1D), saxpy, scaling, rotations,...
- BLAS 2
– operates on matrix (2D), matrix vector
- BLAS 3
– operates on pairs or triplets of matrices, matrix-matrix
- Mathematically are many of these equivalent,
performance wise not!!
Why?
4
Because!
Routine #Flops #mem. refs
daxpy 2n 2n dgemv 2n2 n2 dgemm 2n3 3n2
5
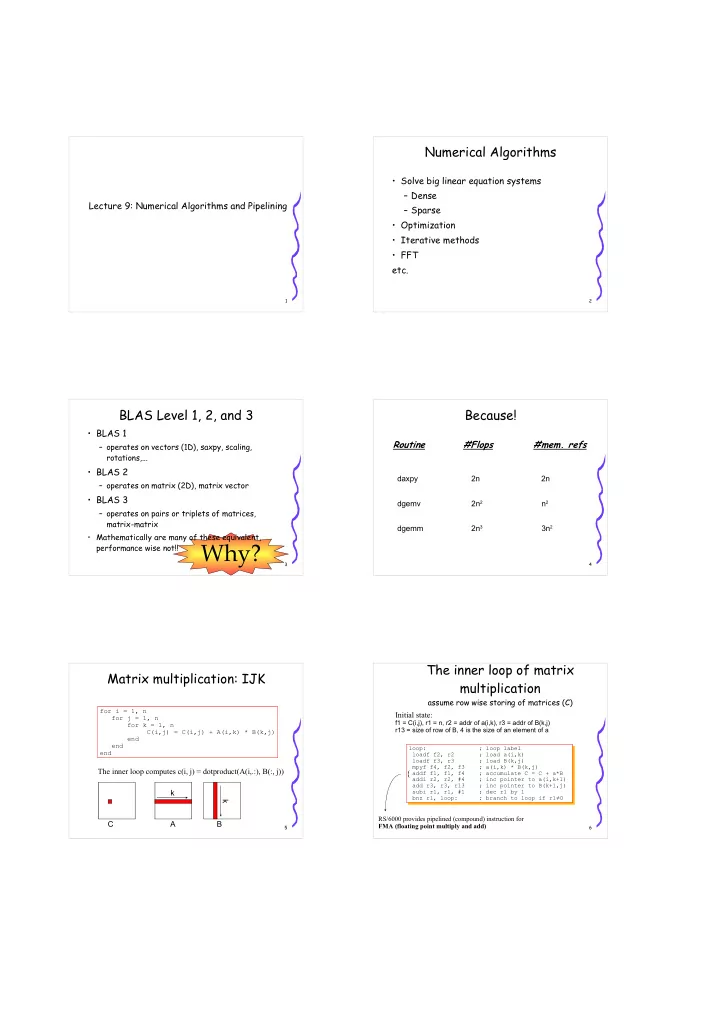
Matrix multiplication: IJK
for i = 1, n for j = 1, n for k = 1, n C(i,j) = C(i,j) + A(i,k) * B(k,j) end end end
C A B k k The inner loop computes c(i, j) = dotproduct(A(i,.:), B(:, j))
6
The inner loop of matrix multiplication
assume row wise storing of matrices (C)
loop: ; loop label loadf f2, r2 ; load a(i,k) loadf f3, r3 ; load B(k,j) mpyf f4, f2, f3 ; a(i,k) * B(k,j) addf f1, f1, f4 ; accumulate C = C + a*B addi r2, r2, #4 ; inc pointer to a(i,k+1) add r3, r3, r13 ; inc pointer to B(k+1,j) subi r1, r1, #1 ; dec r1 by 1 bnz r1, loop: ; branch to loop if r1≠0
Initial state:
f1 = C(i,j), r1 = n, r2 = addr of a(i,k), r3 = addr of B(k,j) r13 = size of row of B, 4 is the size of an element of a RS/6000 provides pipelined (compound) instruction for FMA (floating point multiply and add)
{