Stream Reasoning using Temporal Logic and Predictive Probabilistic - PowerPoint PPT Presentation
Stream Reasoning using Temporal Logic and Predictive Probabilistic State Models Mattias Tiger Fredrik Heintz Artificial Intelligence and Integrated Computer Systems Department of Computer and Information Science Link oping University,
Stream Reasoning using Temporal Logic and Predictive Probabilistic State Models Mattias Tiger Fredrik Heintz Artificial Intelligence and Integrated Computer Systems Department of Computer and Information Science Link¨ oping University, Sweden
Introduction Stochastic and Predictive Stream Reasoning Motivation UAV example Stream Reasoning Summary Execution Monitoring in Robotics Am I in a no-fly zone? - boolean Is it likely that I am in a no-fly zone? Is it likely that I am about to crash into the wall in the near future? Mattias Tiger, Fredrik Heintz Link¨ oping University 2/13
Introduction Stochastic and Predictive Stream Reasoning Motivation UAV example Stream Reasoning Summary Execution Monitoring in Robotics Am I in a no-fly zone? - boolean Is it likely that I am in a no-fly zone? Is it likely that I am about to crash into the wall in the near future? Mattias Tiger, Fredrik Heintz Link¨ oping University 2/13
Introduction Stochastic and Predictive Stream Reasoning Motivation UAV example Stream Reasoning Summary Metric Temporal Logic ( MTL ) formulas are evaluated over the stream (infinite state sequence) using Progression . Incremental evaluation by formula re-writing to incorporate what has been observed so far. Mattias Tiger, Fredrik Heintz Link¨ oping University 3/13
Introduction Intuition Stochastic and Predictive Stream Reasoning P-MTL: Stochastic temporal term operator UAV example P-MTL: Syntax Summary P-MTL: Grounding What do we know (about terms) at t k ? Mattias Tiger, Fredrik Heintz Link¨ oping University 4/13
Introduction Intuition Stochastic and Predictive Stream Reasoning P-MTL: Stochastic temporal term operator UAV example P-MTL: Syntax Summary P-MTL: Grounding What do we know (about terms) at t k ? Mattias Tiger, Fredrik Heintz Link¨ oping University 5/13
Introduction Intuition Stochastic and Predictive Stream Reasoning P-MTL: Stochastic temporal term operator UAV example P-MTL: Syntax Summary P-MTL: Grounding What do we know (about terms) at t k ? Mattias Tiger, Fredrik Heintz Link¨ oping University 5/13
Introduction Intuition Stochastic and Predictive Stream Reasoning P-MTL: Stochastic temporal term operator UAV example P-MTL: Syntax Summary P-MTL: Grounding What do we know (about terms) at t k ? Mattias Tiger, Fredrik Heintz Link¨ oping University 5/13
Introduction Intuition Stochastic and Predictive Stream Reasoning P-MTL: Stochastic temporal term operator UAV example P-MTL: Syntax Summary P-MTL: Grounding What do we know (about terms) at t k ? Mattias Tiger, Fredrik Heintz Link¨ oping University 5/13
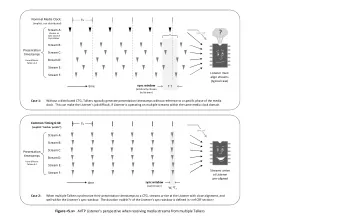
Introduction Intuition Stochastic and Predictive Stream Reasoning P-MTL: Stochastic temporal term operator UAV example P-MTL: Syntax Summary P-MTL: Grounding Truth values of predicates Numerical values of terms Stochastic estimates of terms (Green, solid outline) Stochastic predictions of terms (Red, dashed outline) Mattias Tiger, Fredrik Heintz Link¨ oping University 6/13
Introduction Intuition Stochastic and Predictive Stream Reasoning P-MTL: Stochastic temporal term operator UAV example P-MTL: Syntax Summary P-MTL: Grounding An alternative view Mattias Tiger, Fredrik Heintz Link¨ oping University 7/13
Introduction Intuition Stochastic and Predictive Stream Reasoning P-MTL: Stochastic temporal term operator UAV example P-MTL: Syntax Summary P-MTL: Grounding P-MTL is MTL extended with a stochastic temporal term operator Estimated feature: t | t Altitude[ uav1 ] ( t ≤ 0) t ′ | t Altitude[ uav1 ] ( t ≤ 0 , t ′ � = t ) Predicted feature: � � Altitude[ uav1 ] − Altitude[ roofA ]) > 2 � � Pr (( 0 | 0 Altitude[ uav1 ] − 0 | 0 Altitude[ roofA ]) > 2) ≥ 0 . 99 � � Pr (( 3 | 0 Altitude[ uav1 ] − 0 | 0 Altitude[ roofA ]) > 2) ≥ 0 . 99 Mattias Tiger, Fredrik Heintz Link¨ oping University 8/13
Introduction Intuition Stochastic and Predictive Stream Reasoning P-MTL: Stochastic temporal term operator UAV example P-MTL: Syntax Summary P-MTL: Grounding P-MTL is MTL extended with a stochastic temporal term operator Estimated feature: t | t Altitude[ uav1 ] ( t ≤ 0) t ′ | t Altitude[ uav1 ] ( t ≤ 0 , t ′ � = t ) Predicted feature: � � Altitude[ uav1 ] − Altitude[ roofA ]) > 2 � � Pr (( 0 | 0 Altitude[ uav1 ] − 0 | 0 Altitude[ roofA ]) > 2) ≥ 0 . 99 � � Pr (( 3 | 0 Altitude[ uav1 ] − 0 | 0 Altitude[ roofA ]) > 2) ≥ 0 . 99 Mattias Tiger, Fredrik Heintz Link¨ oping University 8/13
Introduction Intuition Stochastic and Predictive Stream Reasoning P-MTL: Stochastic temporal term operator UAV example P-MTL: Syntax Summary P-MTL: Grounding P-MTL is MTL extended with a stochastic temporal term operator Estimated feature: t | t Altitude[ uav1 ] ( t ≤ 0) t ′ | t Altitude[ uav1 ] ( t ≤ 0 , t ′ � = t ) Predicted feature: � � Altitude[ uav1 ] − Altitude[ roofA ]) > 2 � � Pr (( 0 | 0 Altitude[ uav1 ] − 0 | 0 Altitude[ roofA ]) > 2) ≥ 0 . 99 � � Pr (( 3 | 0 Altitude[ uav1 ] − 0 | 0 Altitude[ roofA ]) > 2) ≥ 0 . 99 Mattias Tiger, Fredrik Heintz Link¨ oping University 8/13
Introduction Intuition Stochastic and Predictive Stream Reasoning P-MTL: Stochastic temporal term operator UAV example P-MTL: Syntax Summary P-MTL: Grounding P-MTL is MTL extended with a stochastic temporal term operator Estimated feature: t | t Altitude[ uav1 ] ( t ≤ 0) t ′ | t Altitude[ uav1 ] ( t ≤ 0 , t ′ � = t ) Predicted feature: � � Altitude[ uav1 ] − Altitude[ roofA ]) > 2 � � Pr (( 0 | 0 Altitude[ uav1 ] − 0 | 0 Altitude[ roofA ]) > 2) ≥ 0 . 99 � � Pr (( 3 | 0 Altitude[ uav1 ] − 0 | 0 Altitude[ roofA ]) > 2) ≥ 0 . 99 Mattias Tiger, Fredrik Heintz Link¨ oping University 8/13
Introduction Intuition Stochastic and Predictive Stream Reasoning P-MTL: Stochastic temporal term operator UAV example P-MTL: Syntax Summary P-MTL: Grounding P-MTL is MTL extended with a stochastic temporal term operator Estimated feature: t | t Altitude[ uav1 ] ( t ≤ 0) t ′ | t Altitude[ uav1 ] ( t ≤ 0 , t ′ � = t ) Predicted feature: � � Altitude[ uav1 ] − Altitude[ roofA ]) > 2 � � Pr (( 0 | 0 Altitude[ uav1 ] − 0 | 0 Altitude[ roofA ]) > 2) ≥ 0 . 99 � � Pr (( 3 | 0 Altitude[ uav1 ] − 0 | 0 Altitude[ roofA ]) > 2) ≥ 0 . 99 Mattias Tiger, Fredrik Heintz Link¨ oping University 8/13
Introduction Intuition Stochastic and Predictive Stream Reasoning P-MTL: Stochastic temporal term operator UAV example P-MTL: Syntax Summary P-MTL: Grounding Predicates P ( τ 1 , . . . , τ n ) | ¬ α | α ∧ β | α ∨ β | α → β | t 1 α | [ t 1 , t 2 ] α | α | [ t 1 , t 2 ] α | α Terms ¯ t 1 ¯ t 1 | t 2 ¯ f [ const ] | f [ const ] | f [ const ] | const | f ( τ 1 , . . . , τ n ) | Pr ( g ( τ p , c 1 , . . . , c m )) Mattias Tiger, Fredrik Heintz Link¨ oping University 9/13
Introduction Intuition Stochastic and Predictive Stream Reasoning P-MTL: Stochastic temporal term operator UAV example P-MTL: Syntax Summary P-MTL: Grounding Grounding of P-MTL terms in computational environment Mattias Tiger, Fredrik Heintz Link¨ oping University 10/13
Introduction Intuition Stochastic and Predictive Stream Reasoning P-MTL: Stochastic temporal term operator UAV example P-MTL: Syntax Summary P-MTL: Grounding Grounding of P-MTL terms in computational environment E = � T , O , F , ¯ F , X , D , T , P� Mattias Tiger, Fredrik Heintz Link¨ oping University 10/13
Introduction Stochastic and Predictive Stream Reasoning UAV example Summary Example: Execution Monitoring A UAV may only move under the conditions that Its perception is precise The estimate of its position to be within a 1m radius circle with 99% probability Its near-time predictions are precise The prediction of its position 3 seconds from now must be within a 1m radius circle with 95% probability Its near-time prediction quality is high The prediction must match with the then estimated position with at least 50% similarity. Mattias Tiger, Fredrik Heintz Link¨ oping University 11/13
Introduction Stochastic and Predictive Stream Reasoning UAV example Summary Example: Execution Monitoring A UAV may only move under the conditions that Its perception is precise The estimate of its position to be within a 1m radius circle with 99% probability Its near-time predictions are precise The prediction of its position 3 seconds from now must be within a 1m radius circle with 95% probability Its near-time prediction quality is high The prediction must match with the then estimated position with at least 50% similarity. Mattias Tiger, Fredrik Heintz Link¨ oping University 11/13
Introduction Stochastic and Predictive Stream Reasoning UAV example Summary Example: Execution Monitoring A UAV may only move under the conditions that Its perception is precise The estimate of its position to be within a 1m radius circle with 99% probability Its near-time predictions are precise The prediction of its position 3 seconds from now must be within a 1m radius circle with 95% probability Its near-time prediction quality is high The prediction must match with the then estimated position with at least 50% similarity. Mattias Tiger, Fredrik Heintz Link¨ oping University 11/13
Recommend














More recommend
Explore More Topics
Stay informed with curated content and fresh updates.