SCHED DEADLINE: a real-time CPU scheduler for Linux Luca Abeni - PowerPoint PPT Presentation
SCHED DEADLINE: a real-time CPU scheduler for Linux Luca Abeni luca.abeni@santannapisa.it TuToR 2017 Luca Abeni 1 / 33 Scheduling Real-Time Tasks Introduction c j c j+1 Real-Time Scheduling in d j d j+1 f j f j+1 Linux r j r j+1
SCHED DEADLINE: a real-time CPU scheduler for Linux Luca Abeni luca.abeni@santannapisa.it TuToR 2017 Luca Abeni – 1 / 33
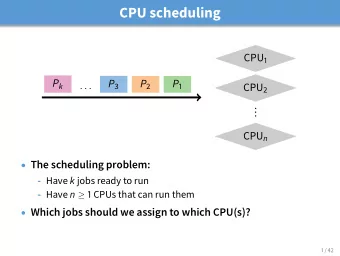
Scheduling Real-Time Tasks Introduction c j c j+1 Real-Time Scheduling in d j d j+1 f j f j+1 Linux r j r j+1 Setting the Scheduling Policy Consider a set of N real-time tasks The Constant � Bandwidth Server Γ = { τ 0 , ...τ N − 1 } SCHED DEADLINE Using SCHED DEADLINE Scheduled on M CPUs � Real-Time theory → lot of scheduling algorithms... � ...But which ones are available on a commonly used � OS? POSIX: fixed priorities � Can be used to do RM, DM, etc... � Multiple processors: DkC, etc... � Linux also provides SCHED DEADLINE : resource � reservations + EDF TuToR 2017 Luca Abeni – 2 / 33
Definitions Introduction Real-time task τ : sequence of jobs J i = ( r i , c i , d i ) � Real-Time Scheduling in Linux Finishing time f i Setting the Scheduling � Policy The Constant Goal: f i ≤ d i � Bandwidth Server SCHED DEADLINE ∀ J i , or control the amount of missed deadlines � Using SCHED DEADLINE Schedule on multiple CPUS: partitioned or global � Schedule in a general-purpose OS � Open System (with online admission control) � Presence of non real-time tasks (do not starve � them!) TuToR 2017 Luca Abeni – 3 / 33
Using Fixed Priorities with POSIX SCHED FIFO and SCHED RR use fixed priorities Introduction � Real-Time Scheduling in Linux They can be used for real-time tasks, to Setting the Scheduling � Policy The Constant implement RM and DM Bandwidth Server SCHED DEADLINE Real-time tasks have priority over non real-time � Using SCHED DEADLINE ( SCHED OTHER ) tasks The difference between the two policies is visible � when more tasks have the same priority In real-time applications, try to avoid multiple � tasks with the same priority TuToR 2017 Luca Abeni – 4 / 33
Setting the Scheduling Policy Introduction int sched_get_priority_max (int policy ); Real-Time Scheduling in Linux int sched_get_priority_min (int policy ); Setting the Scheduling Policy int sched_setscheduler (pid_t pid , int policy , The Constant const struct sched_param *param ); Bandwidth Server int sched_setparam(pid_t pid , SCHED DEADLINE Using const struct sched_param *param ); SCHED DEADLINE If pid == 0 , then the parameters of the running � task are changed The only meaningful field of struct sched param � is sched priority TuToR 2017 Luca Abeni – 5 / 33
Issues with Real-Time Priorities Open Systems → real-time tasks can dynamically Introduction � Real-Time Scheduling in Linux arrive (in an unpredictable way) Setting the Scheduling Policy The Constant Need to re-arrange priorities to respect RM / DM � Bandwidth Server SCHED DEADLINE / ... Using SCHED DEADLINE Interactions with non real-time tasks? � Scheduled in background respect to real-time � tasks Suboptimal utilization? � TuToR 2017 Luca Abeni – 6 / 33
Real-Time Priorities vs “Regular Tasks” In general, “regular” ( SCHED OTHER ) tasks are Introduction � Real-Time Scheduling in Linux scheduled in background respect to real-time ones Setting the Scheduling Policy Real-time tasks can starve other applications � The Constant Bandwidth Server Example: the following task scheduled at high � SCHED DEADLINE Using priority can make a CPU / core unusable SCHED DEADLINE void bad bad task ( ) { while ( 1 ) ; } TuToR 2017 Luca Abeni – 7 / 33
Starvation of Non Real-Time Tasks Introduction Starvation of non real-time tasks � Real-Time Scheduling in Linux Real-time computation have to be limited (use Setting the Scheduling � Policy The Constant real-time priorities only when really needed !) Bandwidth Server SCHED DEADLINE On sane systems, running applications with real-time � Using SCHED DEADLINE priorities requires root privileges (or part of them!) Not usable by everyone � TuToR 2017 Luca Abeni – 8 / 33
Real-Time Throttling Introduction A “bad” high-priority task can make a CPU / core � Real-Time Scheduling in Linux unusable... Setting the Scheduling Policy ...Linux provides the real-time throttling mechanism � The Constant Bandwidth Server to address this problem SCHED DEADLINE Using SCHED DEADLINE How does real-time throttling interfere with � real-time guarantees? Given a priority assignment, a taskset is � guaranteed all the deadlines if no throttling mechanism is used... ...But, what happens in case of throttling? � Very useful idea, but something more “theoretically � founded” might be needed... TuToR 2017 Luca Abeni – 9 / 33
Can We Do Better? Introduction Avoid starvation issues by using resource � Real-Time Scheduling in Linux reservations Setting the Scheduling Policy Use EDF instead of fixed priorities � The Constant Bandwidth Server CPU Reservations + EDF = SCHED DEADLINE !!! SCHED DEADLINE � Using SCHED DEADLINE So, how to implement EDF (or something similar) in � Linux? Issue: the kernel is (was?) not aware of tasks � deadlines... ...But deadlines are needed in order to schedule � the tasks! TuToR 2017 Luca Abeni – 10 / 33
EDF in the Linux Kernel Introduction EDF assigns dynamic priorities based on absolute � Real-Time Scheduling in Linux deadlines Setting the Scheduling Policy So, a more advanced API for the scheduler is � The Constant Bandwidth Server needed... SCHED DEADLINE Using SCHED DEADLINE Assign at least a relative deadline D to the � task... We will see that we need a runtime and a period � too Moreover, d j = r j + D ... � ...However, how can the scheduler know r j ? � The scheduler is not aware of jobs... � TuToR 2017 Luca Abeni – 11 / 33
Tasks, and Jobs... EDF → need to know when a job starts / finishes Introduction � Real-Time Scheduling in Linux Applications must be modified to signal the Setting the Scheduling � Policy The Constant beginning / end of a job (some kind of Bandwidth Server startjob() / endjob() system call)... SCHED DEADLINE Using SCHED DEADLINE ...Or the scheduler can assume that a new job � arrives each time a task wakes up! Or, some other algorithm can be used to assign � dynamic scheduling deadlines to tasks TuToR 2017 Luca Abeni – 12 / 33
...And Scheduling Deadlines! Introduction The scheduler does EDF on scheduling deadlines � Real-Time Scheduling in Linux Scheduling deadline d s : assigned by the kernel Setting the Scheduling � Policy to task τ The Constant Bandwidth Server SCHED DEADLINE But the task cares about its absolute deadlines � Using SCHED DEADLINE If the scheduling deadline d s matches the � absolute deadline d j of a job, then the scheduler can respect d j !!! TuToR 2017 Luca Abeni – 13 / 33
CBS: The Basic Idea Introduction Constant Bandwidth Server (CBS): algorithm used to � Real-Time Scheduling in assign a dynamic scheduling deadline d s to a task τ Linux Setting the Scheduling Policy Based on the Resource Reservation paradigm � The Constant Bandwidth Server Task τ is periodically reserved a maximum SCHED DEADLINE � Using SCHED DEADLINE runtime Q every reservation period P Temporal isolation between tasks � The worst case finishing time for a task does not � depend on the other tasks running in the system... ...Because the task is guaranteed to receive its � reserved time TuToR 2017 Luca Abeni – 14 / 33
CBS: Some More Details Introduction Solves the issue with “bad tasks” trying to consume � Real-Time Scheduling in Linux too much execution time Setting the Scheduling Policy Based on CPU reservations ( Q, P ) � The Constant Bandwidth Server If τ tries to execute for more than Q every P , the SCHED DEADLINE � Using SCHED DEADLINE algorithm decreases its priority, or throttles it τ consumes the same amount of CPU time � consumed by a periodic task with WCET Q and period P Q/P : fraction of CPU time reserved to τ � TuToR 2017 Luca Abeni – 15 / 33
CBS: Admission Control Introduction The CBS is based on EDF � Real-Time Scheduling in Linux Assigns scheduling deadlines d s Setting the Scheduling � Policy EDF on d s ⇒ good CPU utilization (optimal on The Constant � Bandwidth Server SCHED DEADLINE UP!) Using SCHED DEADLINE If EDF is used (based on the scheduling deadlines � assigned by the CBS), then τ i is guaranteed to receive Q i time units every P i if � j Q j /P j ≤ 1 !!! Only on uni-processor / partitioned systems... � M CPUs / cores with global scheduling: if � � j Q j /P j ≤ M each task is guaranteed to receive Q i every P i with a maximum delay TuToR 2017 Luca Abeni – 16 / 33
CBS vs Other Reservation Algorithms Introduction The CBS allows to serve non periodic tasks � Real-Time Scheduling in Linux Some reservation-based schedulers have Setting the Scheduling � Policy The Constant problems with aperiodic job arrivals - due to the Bandwidth Server SCHED DEADLINE (in)famous “deferrable server problem” Using SCHED DEADLINE The CBS explicitly supports aperiodic arrivals � (see the rule for assigning deadlines when a task wakes up) Allows to support “self-suspending” tasks � No need to strictly respect the Liu&Layland task � model No need to explicitly signal job arrivals / � terminations TuToR 2017 Luca Abeni – 17 / 33
Recommend










More recommend
Explore More Topics
Stay informed with curated content and fresh updates.