Page 1 Remote Sensing Range Scanners Tilt-Shift Lens Examples - PDF document
Outline Controlled Illumination in Remote Sensing Range Scanners BRDF measurement Computational Illumination Display Systems Active Light - Devices and Techniques Projector Systems single camera - single projector systems
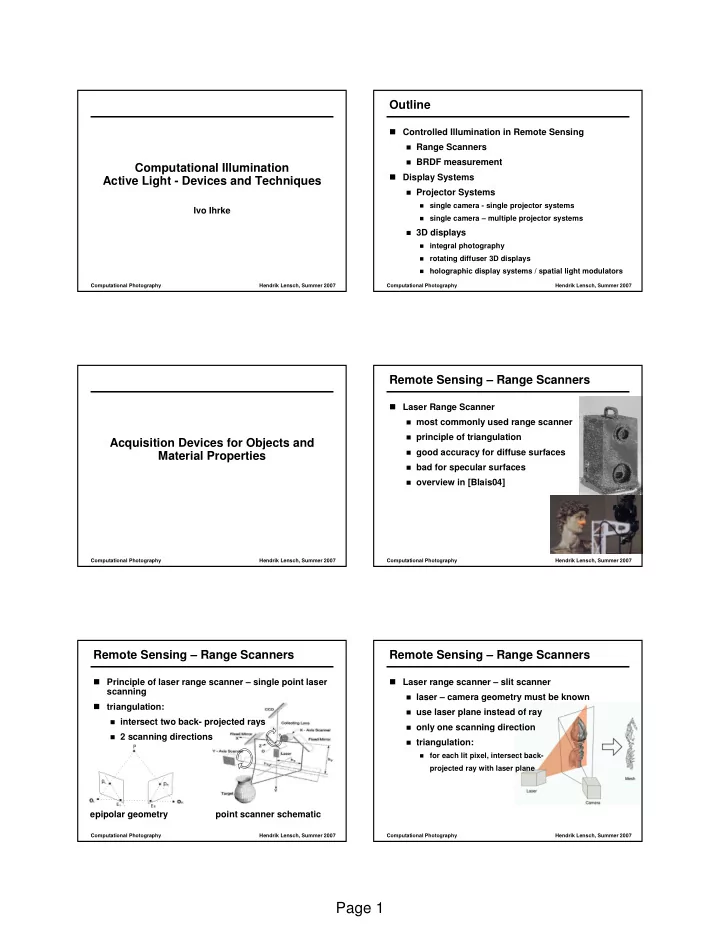
Outline � Controlled Illumination in Remote Sensing � Range Scanners � BRDF measurement Computational Illumination � Display Systems Active Light - Devices and Techniques � Projector Systems � single camera - single projector systems Ivo Ihrke � single camera – multiple projector systems � 3D displays � integral photography � rotating diffuser 3D displays � holographic display systems / spatial light modulators Computational Photography Hendrik Lensch, Summer 2007 Computational Photography Hendrik Lensch, Summer 2007 Remote Sensing – Range Scanners � Laser Range Scanner � most commonly used range scanner � principle of triangulation Acquisition Devices for Objects and � good accuracy for diffuse surfaces Material Properties � bad for specular surfaces � overview in [Blais04] Computational Photography Hendrik Lensch, Summer 2007 Computational Photography Hendrik Lensch, Summer 2007 Remote Sensing – Range Scanners Remote Sensing – Range Scanners � Principle of laser range scanner – single point laser � Laser range scanner – slit scanner scanning � laser – camera geometry must be known � triangulation: � use laser plane instead of ray � intersect two back- projected rays � only one scanning direction � 2 scanning directions � triangulation: � for each lit pixel, intersect back- projected ray with laser plane epipolar geometry point scanner schematic Computational Photography Hendrik Lensch, Summer 2007 Computational Photography Hendrik Lensch, Summer 2007 Page 1
Remote Sensing – Range Scanners Tilt-Shift Lens Examples � Laser Range Scanners – focal plane selection � Scheimpflug principle � tilt-shift lenses focal plane Scheimpflug principle application in range scanning � extend depth of field Computational Photography Hendrik Lensch, Summer 2007 Computational Photography Hendrik Lensch, Summer 2007 Remote Sensing – Range Scanners Remote Sensing – Range Scanners � Laser Range Scanning – Cheapo Version [Winkelbach06] � Structured Light Scanners � hand-held line laser � variation on a theme: triangulation by ray-plane � known background geometry intersections � need two planes that are not co-linear � sequential projection of patterns allows for � known camera calibration simultaneous identification of several illumination � compute laser plane from lines plane intersections on the background planes example for 8 planes � triangulate by ray-plane intersection ���� � � � � � � � � � ���� � � � � � � � � � ���� � � � � � � � � � need passes to identify N planes ��� 2 � N � Computational Photography Hendrik Lensch, Summer 2007 Computational Photography Hendrik Lensch, Summer 2007 Remote Sensing – Range Scanners Remote Sensing – Range Scanners � Structured Light Scanners with Phase-Shifting [Wolf03] � dynamic structured light scanner [Wolf03] � combines binary encoding and shifted sine patterns � 3 binary patterns � 4 phase shifted sinusoidal patterns binary code (coarse depth) � 200 fps camera sinusoidal patterns (fine depth) � � � � ~30 3D scans/second realized by � defocusing � optical filters � gray values structured light image z-image 3D-object Computational Photography Hendrik Lensch, Summer 2007 Computational Photography Hendrik Lensch, Summer 2007 Page 2
Remote Sensing – Range Scanners Remote Sensing – Range Scanners � Structured Light Scanner – Cheapo Version � Stick Scanner in action [Bouguet98] setup desktop setup outdoor � uses a web-cam, a desk lamp, a pen ~15 € � calibrated � light source position � ground plane � camera parameters � estimate shadow plane by computing line on the ground plane ray-plane triangulation for 3D reconstruction � � accuracy: 0.1 - 0.3 mm in a range of 10 cm Computational Photography Hendrik Lensch, Summer 2007 Computational Photography Hendrik Lensch, Summer 2007 Remote Sensing – Range Scanners Remote Sensing – Range Scanners � time-of-flight scanners [Gvili03] � time-of-flight scanner – examples � NOT triangulation based � accuracy 1-2 cm in a range of 4 – 7 m � short infrared laser pulse is sent from camera � applications: � reflection is recorded in a very short time frame � "depth keying" replaces chroma keying (picoseconds) � 3D interaction � results in depth profile (intensity image) � large scale 3D scanning (LIDAR – light detection and ranging) Computational Photography Hendrik Lensch, Summer 2007 Computational Photography Hendrik Lensch, Summer 2007 Remote Sensing – Range Scanners Remote Sensing – Range Scanners � depth from projection defocus [Zhang06] principle of operation � setup: camera and projector with aligned optical � focus projector behind scene element with the axes ����������� largest distance � project a moving binary stripe pattern (step functions) ����������� � pattern is blurred for objects not in the focal plane � blur decreases with distance ��������� ������ from projector ��������� ������ Computational Photography Hendrik Lensch, Summer 2007 Computational Photography Hendrik Lensch, Summer 2007 Page 3
Remote Sensing – Range Scanners Remote Sensing – Range Scanners � record video sequence � defocused patterns correspond to a low pass filtered version of the original pattern � � allows for (temporal) per-pixel scanning of the � � � filter is depth dependent ! blurred intensity profile � analyze frequency spectrum: vertically slanted plane (gray values indicate depth) projection pattern scanned profile radiance profiles at points of different depth frequency spectrum Computational Photography Hendrik Lensch, Summer 2007 Computational Photography Hendrik Lensch, Summer 2007 Remote Sensing – Range Scanners Remote Sensing – Range Scanners � defocused patterns correspond to a low pass � use first two coefficients of discrete Fourier filtered version of the original pattern calibration depth map variation of theta transform to compute different slopes w.r.t. vertical axis (vertically slanted plane) � filter is depth dependent ! parameter (mind the different scale representative of slope � analyze frequency spectrum: of the diagrams) θ � � � � � scanned profile � depth-theta look-up table indicates how heavily low-pass filtered the for three different signal is in a particular horizontal positions pixel � � depth measure � � frequency spectrum (look-up table computed by pre-calibration) Computational Photography Hendrik Lensch, Summer 2007 Computational Photography Hendrik Lensch, Summer 2007 Remote Sensing – Range Scanners Remote Sensing – Range Scanners � Depth from Projection Defocus � advantages � per-pixel independent measurements � accurate at occlusion boundaries � works well for glossy surface properties � Issues: � need small camera aperture (no defocus from lens) � � need bright projector � � � projectors usually do not have high-frequency light sources (image not stable) Computational Photography Hendrik Lensch, Summer 2007 Computational Photography Hendrik Lensch, Summer 2007 Page 4
Remote Sensing – BRDF Measurements Remote Sensing – BRDF Measurements � � BRDF acquisition � BRDF measurement with basis function illumination L � � � � f � � θ � , φ � , θ � , φ � � L � � θ � , φ � � cosθ � dω � 4 degrees of freedom � principle: project basis illumination and BRDF examples [Matusik03] simultaneously measure response � 2 for incoming light example basis functions direction � θ � , φ � � [Koenderink96] camera � 2 for viewing direction � θ � , φ � � projector beam splitter gonioreflectometer material sample Computational Photography Hendrik Lensch, Summer 2007 Computational Photography Hendrik Lensch, Summer 2007 Remote Sensing – BRDF Measurements Remote Sensing – BRDF Measurements � approximate BRDF by linear combination of � Measurement Apparatus [Ghosh07] (orthonormal) basis functions � mirrored dome and parabola allow for � insert into reflectance calculation simultaneous projection of basis illumination and recording of the response � basis function coefficients are directly measured � type of basis functions: spherical harmonics � � coefficients are given by � � [Cabral87, Kautz02] Computational Photography Hendrik Lensch, Summer 2007 Computational Photography Hendrik Lensch, Summer 2007 Remote Sensing – BRDF Measurements � design of the dome � fix camera and parabola � ray-trace to determine dome and hole geometry Display Technologies design of measurment setup physical realization using rapid prototyping equipment (3D printer) Computational Photography Hendrik Lensch, Summer 2007 Computational Photography Hendrik Lensch, Summer 2007 Page 5
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.