Optimum IIR Filters Introduction and Scope Definitions Discussed - PowerPoint PPT Presentation
Optimum IIR Filters Introduction and Scope Definitions Discussed FIR filters for both stationary and nonstationary cases Design and properties For simplicity and due to time constraints, will limit discussion of IIR filters to
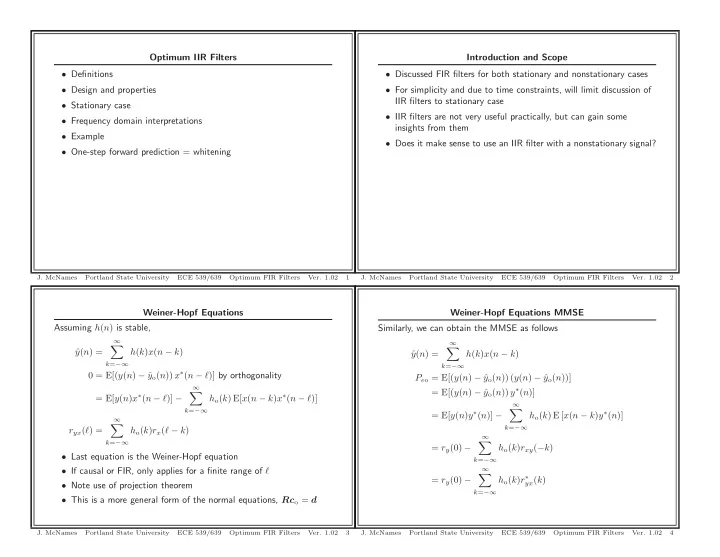
Optimum IIR Filters Introduction and Scope • Definitions • Discussed FIR filters for both stationary and nonstationary cases • Design and properties • For simplicity and due to time constraints, will limit discussion of IIR filters to stationary case • Stationary case • IIR filters are not very useful practically, but can gain some • Frequency domain interpretations insights from them • Example • Does it make sense to use an IIR filter with a nonstationary signal? • One-step forward prediction = whitening J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 1 J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 2 Weiner-Hopf Equations Weiner-Hopf Equations MMSE Assuming h ( n ) is stable, Similarly, we can obtain the MMSE as follows ∞ ∞ � y ( n ) = ˆ h ( k ) x ( n − k ) � y ( n ) = ˆ h ( k ) x ( n − k ) k = −∞ k = −∞ 0 = E[( y ( n ) − ˆ y o ( n )) x ∗ ( n − ℓ )] by orthogonality P e o = E[( y ( n ) − ˆ y o ( n )) ( y ( n ) − ˆ y o ( n ))] ∞ = E[( y ( n ) − ˆ y o ( n )) y ∗ ( n )] � = E[ y ( n ) x ∗ ( n − ℓ )] − h o ( k ) E[ x ( n − k ) x ∗ ( n − ℓ )] ∞ k = −∞ � = E[ y ( n ) y ∗ ( n )] − h o ( k ) E [ x ( n − k ) y ∗ ( n )] ∞ � k = −∞ r yx ( ℓ ) = h o ( k ) r x ( ℓ − k ) ∞ k = −∞ � = r y (0) − h o ( k ) r xy ( − k ) • Last equation is the Weiner-Hopf equation k = −∞ • If causal or FIR, only applies for a finite range of ℓ ∞ � = r y (0) − h o ( k ) r ∗ yx ( k ) • Note use of projection theorem k = −∞ • This is a more general form of the normal equations, Rc o = d J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 3 J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 4
Weiner-Hopf Equations Impulse Response MSE If noncasual IIR, the Weiner-Hopf equations apply for all values of ℓ Alternatively, we can minimize the MSE. Given that and can be expressed as a convolution ˆ y ( n ) = h ( n ) ∗ x ( n ) ∞ � h o ( k ) r x ( ℓ − k ) = r yx ( ℓ ) h o ( ℓ ) ∗ r x ( ℓ ) = r yx ( ℓ ) where h ( n ) is not necessarily the optimal impulse response, find an expression for the MSE. Do not use the assumption that h ( n ) is FIR or k = −∞ causal in your derivation. H o = R yx (e jω ) H o (e jω ) R x (e jω ) = R yx (e jω ) R x (e jω ) � y ( n ) | 2 � • Thus we immediately obtain an expression for the optimal P e = E | y ( n ) − ˆ noncausal transfer function y ( n )) ∗ ( y ( n ) − ˆ � � = E ( y ( n ) − ˆ y ( n )) • It is more difficult to obtain the optimum impulse response, = E [( y ∗ ( n ) − ˆ y ∗ ( n )) ( y ( n ) − ˆ y ( n ))] though it is completely defined by the Weiner-Hopf equations = E [ y ∗ ( n ) y ( n )] − E [ y ∗ ( n )ˆ y ( n )] − E [ˆ y ∗ ( n ) y ( n )] + E [ˆ y ∗ ( n )ˆ y ( n )] ① ② ③ ④ J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 5 J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 6 Impulse Response MSE Continued Impulse Response MSE Continued P e = E [ y ∗ ( n ) y ( n )] − E [ y ∗ ( n )ˆ y ( n )] − E [ˆ y ∗ ( n ) y ( n )] + E [ˆ y ∗ ( n )ˆ y ( n )] = E [ y ∗ ( n )ˆ y ( n )] ② ① ② ③ ④ � � �� ∞ � = E y ∗ ( n ) h ( ℓ ) x ( n − ℓ ) � π E [ y ∗ ( n ) y ( n )] = r y (0) = 1 R y (e jω ) d ω ℓ = −∞ ① = 2 π ∞ − π � = h ( ℓ ) E [ y ∗ ( n ) x ( n − ℓ )] ℓ = −∞ ∞ � = h ( ℓ ) r ∗ yx ( ℓ ) ℓ = −∞ � ∞ ∞ 1 � H (e jω ) R ∗ yx (e jω ) d ω h ( ℓ ) r ∗ yx ( ℓ ) = 2 π −∞ ℓ = −∞ � ∞ ② ∗ = 1 H ∗ (e jω ) R yx (e jω ) d ω ③ = 2 π −∞ J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 7 J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 8
Impulse Response MSE Continued Impulse Response MSE Continued P e = E [ y ∗ ( n ) y ( n )] − E [ y ∗ ( n )ˆ y ( n )] − E [ˆ y ∗ ( n ) y ( n )] + E [ˆ y ∗ ( n )ˆ y ( n )] ∞ ∞ ① ② ③ ④ � � = h ∗ ( k ) h ( ℓ ) r x ( k − ℓ ) ④ k = −∞ ℓ = −∞ ④ = E [ˆ y ∗ ( n )ˆ y ( n )] ∞ � �� � � �� = h ∗ ( k ) ( h ( k ) ∗ r x ( k )) ∞ ∞ � � = E h ∗ ( k ) x ∗ ( n − k ) h ( ℓ ) x ( n − ℓ ) k = −∞ k = −∞ ℓ = −∞ � z ( k ) h ( k ) ∗ r x ( k ) � � ∞ ∞ � � ∞ = E h ∗ ( k ) h ( ℓ ) x ∗ ( n − k ) x ( n − ℓ ) � = h ∗ ( k ) z ( k ) ④ k = −∞ ℓ = −∞ k = −∞ ∞ ∞ � ∞ 1 � � = h ∗ ( k ) h ( ℓ ) E [ x ( n − ℓ ) x ∗ ( n − k )] H ∗ (e jω ) Z (e jω ) d ω = 2 π k = −∞ ℓ = −∞ −∞ � ∞ 1 ∞ ∞ H ∗ (e jω ) H (e jω ) R x (e jω ) d ω = � � = h ∗ ( k ) h ( ℓ ) r x ( k − ℓ ) 2 π −∞ k = −∞ ℓ = −∞ J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 9 J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 10 Impulse Response MSE Continued Re-examining the Stationary MSE Recall that in the FIR case we can express the MSE in terms of the ∞ ∞ cross-correlation matrix R and vector d � � P e = r y (0) − h ( ℓ ) r ∗ yx ( − ℓ ) − h ∗ ( ℓ ) r yx ( − ℓ ) | e ( n ) | 2 � � ℓ = −∞ ℓ = −∞ P e = E ∞ ∞ �� � H � �� y ( n ) − c H x ( n ) y ( n ) − c H x ( n ) � � = E + h ∗ ( k ) h ( ℓ ) r x ( k − ℓ ) k = −∞ ℓ = −∞ �� y ∗ ( n ) − x H ( n ) c � � y ( n ) − c H x ( n ) �� = E � ∞ 1 R y (e jω ) − H (e jω ) R ∗ yx (e jω ) − H ∗ (e jω ) R yx (e jω ) = � y ∗ ( n ) y ( n ) − x H ( n ) c y ( n ) − y ∗ ( n ) c H x ( n ) = E 2 π −∞ c H x ( n ) x H ( n ) c � � � �� + + H ∗ (e jω ) H (e jω ) R x (e jω ) d ω c − c H E [ x ( n ) y ∗ ( n )] | y ( n ) | 2 � x H ( n ) y ( n ) � � � = E − E + c H E x ( n ) x H ( n ) � � c • Recall we did not assume h ( n ) is FIR or causal, though it does P y − d H c − c H d + c H Rc = work in the case where c ∗ = h • This gives us two additional ways of calculating the MSE in terms of 1) the impulse response and 2) the frequency domain J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 11 J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 12
Frequency Domain MSE: Completing the Square Optimum IIR Stationary Filter Find the optimum IIR noncausal H (e jω ) by minimizing the MSE. � ∞ 1 R y (e jω ) + R yx (e jω ) R − 1 x (e jω ) R ∗ yx (e jω ) P e = � ∞ 1 2 π R y (e jω ) − H (e jω ) R ∗ yx (e jω ) − R yx (e jω ) H ∗ (e jω ) P e = −∞ � ∗ d ω 2 π R x (e jω ) H (e jω ) − R yx (e jω ) R − 1 x (e jω ) R x (e jω ) H (e jω ) − R yx (e jω ) � � � + −∞ + H (e jω ) R x (e jω ) H ∗ (e jω ) d ω • This is very similar to the approach we used to find the optimum � ∞ 1 R y (e jω ) + H (e jω ) R x (e jω ) H ∗ (e jω ) − R ∗ yx (e jω ) FIR filter in terms of R and d � � = 2 π −∞ • The MMSE is obtained by setting the last term to zero, − R yx (e jω ) H ∗ (e jω ) d ω H o (e jω ) = R yx (e jω ) � ∞ 1 R x (e jω ) as before R y (e jω ) + R yx (e jω ) R − 1 x (e jω ) R ∗ yx (e jω ) = 2 π −∞ � ∞ P e o = 1 H (e jω ) − R yx (e jω ) R − 1 x (e jω ) R x (e jω ) H ∗ (e jω ) − R ∗ yx (e jω ) R y (e jω ) + H o (e jω ) R ∗ yx (e jω ) d ω � � � � + d ω 2 π � ∞ −∞ 1 R y (e jω ) + R yx (e jω ) R − 1 x (e jω ) R ∗ yx (e jω ) = • Requires that R x (e jω ) be positive everywhere (no zeros on the 2 π −∞ unit circle) � ∗ d ω R − 1 � R x (e jω ) H (e jω ) − R yx (e jω ) � x (e jω ) � R x (e jω ) H (e jω ) − R yx (e jω ) + • Equivalently, r x ( ℓ ) must be positive definite (strictly) J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 13 J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 14 Frequency-Domain Minimum MSE The Role of Coherence � π P o = 1 If an optimum filter is used, 1 − G 2 � � R y (e jω ) d ω yx ( ω ) 2 π H o (e jω ) = R yx (e jω ) − π • Recall that coherence is a measure of correlation in the frequency R x (e jω ) domain then the MMSE is given by • If coherence is 1 at a frequency, the error at that frequency is zero � π P e o = 1 R y (e jω ) − H o (e jω ) R ∗ yx (e jω ) d ω • Similarly, if incoherent, the error power is equal to the output 2 π − π signal power � π = 1 1 − G 2 R y (e jω ) d ω � � yx ( ω ) • Applies to both causal IIR and FIR filters 2 π − π where G 2 yx ( ω ) is the magnitude squared coherence, | R xy (e jω ) | 2 G 2 yx ( ω ) � R x (e jω ) R y (e jω ) J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 15 J. McNames Portland State University ECE 539/639 Optimum FIR Filters Ver. 1.02 16
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.