Modeling Objects A prototype has a default size, position, and - PowerPoint PPT Presentation
Modeling Objects A prototype has a default size, position, and Modeling orientation You need to perform modeling transformations to position it within the scene Hierarchical Transformations myCube() - Create a unit cube with its origin
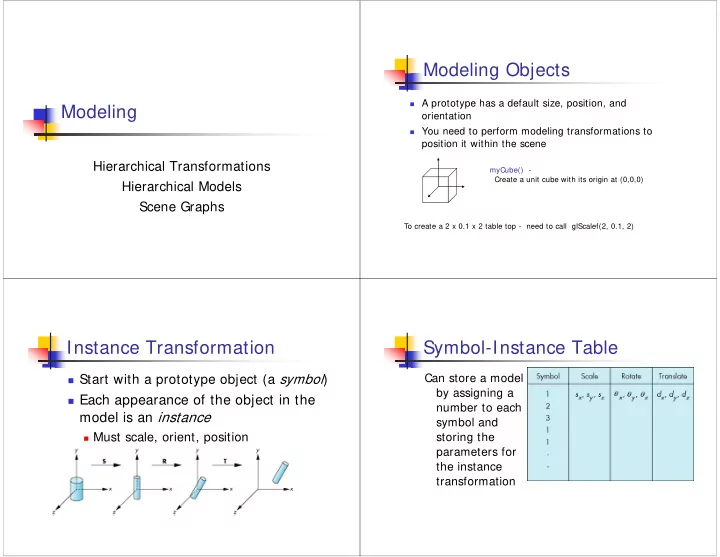
Modeling Objects � A prototype has a default size, position, and Modeling orientation � You need to perform modeling transformations to position it within the scene Hierarchical Transformations myCube() - Create a unit cube with its origin at (0,0,0) Hierarchical Models Scene Graphs To create a 2 x 0.1 x 2 table top - need to call glScalef(2, 0.1, 2) Instance Transformation Symbol-Instance Table Can store a model � Start with a prototype object (a symbol ) by assigning a � Each appearance of the object in the number to each model is an instance symbol and � Must scale, orient, position storing the parameters for � Defines instance transformation the instance transformation
Structure Through Function Relationships in Car Model Calls � Symbol-instance table does not show car(speed) { relationships between parts of model chassis() � Consider model of car wheel(right_front); � Chassis + 4 identical wheels wheel(left_front); wheel(right_rear); � Two symbols wheel(left_rear); } • Fails to show relationships well � Rate of forward motion determined by • Look at problem using a graph rotational speed of wheels Graphs Tree � Set of nodes and edges (links) � Graph in which each node (except the root) has exactly one parent node � Edge connects a pair of nodes � May have multiple children � Directed or undirected � Leaf or terminal node: no children � Cycle : directed path that is a loop root node loop leaf node
Tree Model of Car DAG Model � If we use the fact that all the wheels are identical, we get a directed acyclic graph � Not much different than dealing with a tree Modeling with Trees Robot Arm � Must decide what information to place in nodes and what to put in edges � Nodes � What to draw � Pointers to children parts in their own � Edges robot arm coordinate systems � May have information on incremental changes to transformation matrices (can also store in nodes)
Articulated Models Relationships in Robot Arm � Base rotates independently � Robot arm is an example of an � Single angle determines position articulated model � Lower arm attached to base � Parts connected at joints � Its position depends on rotation � Can specify state of model by of base giving all joint angles � Must also translate relative to base and rotate about connecting joint Relationships in Robot Arm Required Matrices � Rotation of base: R b � Upper arm attached to lower arm � Apply M = R b to base � Translate lower arm relative to base: T la � Its position depends on both base and lower arm � Rotate lower arm around joint: R la � Must translate relative to � Apply M = R b T la R la to lower arm lower arm and rotate � Translate upper arm relative to upper arm: about joint connecting to T ua lower arm � Rotate upper arm around joint: R ua � Apply M = R b T la R la T ua R ua to upper arm
OpenGL Code for Robot Tree Model of Robot robot_arm() � Note code shows relationships between { parts of model glRotate(theta, 0.0, 1.0, 0.0); � Can change “look” of parts base(); easily without altering glTranslate(0.0, h1, 0.0); relationships glRotate(phi, 0.0, 1.0, 0.0); � Simple example of tree model lower_arm(); glTranslate(0.0, h2, 0.0); � Want a general node structure glRotate(psi, 0.0, 1.0, 0.0); for nodes upper_arm(); } Scene Graphs Hierarchical Modeling � Triangles, parametric curves and � Encoding this information in the code is surfaces are the building blocks not very productive. Want it to be from which more complex real- flexible, data-driven and extensible. world objects are modeled. � Scene-graphs provide this functionality. � Hierarchical modeling creates � OpenInventor (http://www.coin3d.org/) complex real-world objects by � Open Scene Graph ( http://www.openscenegraph.com/) combining simple primitive shapes into more complex � Many others aggregate objects.
Articulated Models Multiple Components � Different Materials Scene Layout – Worlds Hierarchical models
Hierarchical models Hierarchical models Hierarchical models Hierarchical models
Hierarchical Grouping of Simple Example with Groups Objects Group { � Logical organization of scene numObjects 3 Group { fruits numObjects 3 chair Box { <BOX PARAMS> } Box { <BOX PARAMS> } Box { <BOX PARAMS> } } Group { table numObjects 2 Group { Box { <BOX PARAMS> } ground Box { <BOX PARAMS> } Box { <BOX PARAMS> } } Group { Box { <BOX PARAMS> } Sphere { <SPHERE PARAMS> } Sphere { <SPHERE PARAMS> } } } Plane { <PLANE PARAMS> } } Adding Materials Group { Adding Transformations numObjects 3 Material { <BLUE> } Group { numObjects 3 Box { <BOX PARAMS> } Box { <BOX PARAMS> } Box { <BOX PARAMS> } } Group { numObjects 2 Material { <BROWN> } Group { Box { <BOX PARAMS> } Box { <BOX PARAMS> } Box { <BOX PARAMS> } } Group { Material { <GREEN> } Box { <BOX PARAMS> } Material { <RED> } Sphere { <SPHERE PARAMS> } Material { <ORANGE> } Sphere { <SPHERE PARAMS> } } } Material { <BLACK> } Plane { <PLANE PARAMS> } }
Simple Example with Transforms Hierarchical Transformation of Group { numObjects 3 Objects Transform { ZRotate { 45 } Group { � Transforms position numObjects 3 logical groupings of Box { <BOX PARAMS> } Box { <BOX PARAMS> } objects within the Box { <BOX PARAMS> } } } Transform { scene Translate { -2 0 0 } Group { numObjects 2 Group { Box { <BOX PARAMS> } Box { <BOX PARAMS> } Box { <BOX PARAMS> } } Group { Box { <BOX PARAMS> } Sphere { <SPHERE PARAMS> } Sphere { <SPHERE PARAMS> } } } } Plane { <PLANE PARAMS> } } Separating types of transformation Hierarchical modeling in OpenGL � Note that we have treated translations, � Commands to change current transformation rotations, etc. as separate � glTranslate, glScale, etc. � But they are all represented by 4x4 matrices � Affects the state , i.e. all following commands and there is no technical reason not to will undergo this transformation combine them into the resulting matrix � Utilities to maintain a matrix stack (to revert � It’s just simpler for the human programmer, to previous state) and corresponds to the handle of 3D � Difference between model and view matrix modeling/animation packages
Model vs. Projection matrix Managing the state It is almost the same to rotate the camera or the objects � � To reset everything: Main difference: � glLoadI dentity(); Lighting � This is why OpenGL has two transforms: model and projection � � OpenGL stores a glMatrixMode( GL_MODELVIEW ); stack of matrices Tells openGL that next matrix commands deal with the objects. � � You don’t need to typically used for modeling & animation � remember, OpenGL remembers glMatrixMode(GL_PROJECTION); Tells OpenGL we deal with the camera space ( � glPushMatrix() � typically used to change viewpoint & focal length � � glPopMatrix Scene Graph Managing the state � Convenient Data structure for scene � Push matrix when representation you start rendering � Transformations a group � Materials, color � Pop once you are � Multiple instances done � Basic idea: Hierarchical Tree � Useful for manipulation/animation � Especially for articulated figures � Useful for rendering too � Multi-pass rendering, occlusion culling
Scene Graphs Traversal � Basic idea: Tree � Depth first � Comprised of several node � Top to bottom, left to right types: � Shape: 3D geometric objects � Transform: Affect current transformation � Property: Appearance, texture, etc. � Group: Collection of subgraphs Traversal State Other Scene Nodes � Switch or Selector Nodes � The State is updated during traversal � Level of detail � Transformations, properties � Different rendering styles � Influence of nodes can be complex � Damaged v. undamaged states � E.g. bottom to top � Sequence Nodes � Animated sequence � Objects � Textures � Transformations
Object Following or Tethering Camera Tethering � Can attach an object to the node of � Many times, we want the camera to follow an entity. another object (or group them in a parent node. � Need to get the coordinate frame for the entity. � Provide an offset to have the other � Traverse the scene graph to the entity. object tag along with the object under � Or, need to get the current camera system control. � Attach camera and determine transformations to the root of the scene graph.
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.