Principle of Communications, Fall 2017 Lecture 02 Digital Modulation I-Hsiang Wang ihwang@ntu.edu.tw National Taiwan University 2017/9/21
Outline • Digital-to-analog and analog-to-digital: a signal space perspective • Pulse amplitude modulation (PAM), pulse shaping, and the Nyquist criterion • Quadrature amplitude modulation (QAM), and the equivalent complex baseband representation • Symbol mapping and constellation set 2
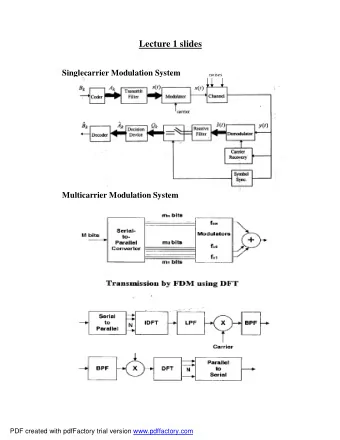
System architecture of digital modulation x ( t ) Symbol Pulse Up { u m } x b ( t ) { c i } Mapper Shaper Converter discrete baseband passband coded bits Noisy sequence waveform waveform Channel y ( t ) Symbol { ˆ u m } Sampler y b ( t ) Down { ˆ c i } Demapper + Filter Converter • Three major components (for the Tx): ‣ Symbol mapping: bit sequence → symbol sequence ‣ Pulse shaping: symbol sequence → (baseband) waveform ‣ Up conversion: baseband waveform → passband waveform 3
Symbol mapping x ( t ) Symbol Pulse Up { u m } x b ( t ) { c i } Mapper Shaper Converter discrete baseband passband coded bits Noisy sequence waveform waveform Channel y ( t ) Symbol { ˆ u m } Sampler y b ( t ) Down { ˆ c i } Demapper + Filter Converter • To be designed: the constellation set and how to map bits to symbols • Constellation sets to be covered: standard PSK, standard PAM, standard QAM • Mapping: Gray mapping 4
Conversion between sequence and waveform x ( t ) Symbol Pulse Up { u m } x b ( t ) { c i } Mapper Shaper Converter discrete baseband passband coded bits Noisy sequence waveform waveform Channel y ( t ) Symbol { ˆ u m } Sampler y b ( t ) Down { ˆ c i } Demapper + Filter Converter • A pragmatic approach: Pulse Amplitude Modulation (PAM) • To be designed: the modulating pulse • System parameter: bandwidth • Nyquist criterion : a su ffi cient condition for the pulse to satisfy in order to avoid aliasing e ff ect 5
Conversion between basedband and passband x ( t ) Symbol Pulse Up { u m } x b ( t ) { c i } Mapper Shaper Converter discrete baseband passband coded bits Noisy sequence waveform waveform Channel y ( t ) Symbol { ˆ u m } Sampler y b ( t ) Down { ˆ c i } Demapper + Filter Converter • A pragmatic approach: Quadrature Amplitude Modulation (QAM) • Essentially speaking, PAM with two branches: ‣ one mixed with cosine, the other with sine ‣ system parameter: carrier frequency • Equivalent complex baseband representation 6
Part I. Signal Space A Linear Algebraic Point to View for the Conversion between Sequences and Waveforms 7
Fourier series for time-limited signals Analysis (waveform → sequence) Synthesis (sequence → waveform) x ( t ) → x [ m ] x [ m ] → x ( t ) ∞ x [ m ] = 1 � t d t x ( t ) e − j2 π m x [ m ] e j 2 π m � t x ( t ) = T T T T m = −∞ � ∞ ∞ x [ m ] 1 x ( t ) 1 t d t e − j2 π m e j 2 π m � t x ( t ) = x [ m ] = T T √ √ T T −∞ m = −∞ φ ∗ m ( t ) φ m ( t ) 1 exp(j2 π φ m ≡ φ m ( t ) � Fourier Basis: T mt ) , m ∈ Z , √ T 8
Sampling theorem for band-limited signals Analysis (waveform → sequence) Synthesis (sequence → waveform) x ( t ) → x [ m ] x [ m ] → x ( t ) � m ∞ � � x ( t ) = x [ m ] sinc(2 Wt − m ) x [ m ] = x ( t ) | t = m 2 W = x 2 W m = −∞ ∞ 1 √ � x [ m ] = x ( m/ 2 W ) x ( t ) = x [ m ] 2 W sinc(2 Wt − m ) √ 2 W m = −∞ φ m ( t ) φ ∗ m ( t ) � ∞ √ check! = x ( t ) 2 W sinc(2 Wt − m ) d t −∞ √ Sinc Basis: φ m ≡ φ m ( t ) � 2 W sinc(2 Wt − m ) , m ∈ Z 9
Signal space intrepretation waveform → sequence sequence → waveform x ( t ) → x [ m ] x [ m ] → x ( t ) { x [ m ] } → { φ m ( t ) } → x ( t ) x ( t ) → φ m ( t ) → x [ m ] � ∞ ∞ � = x ( t ) φ ∗ m ( t ) d t = x [ m ] φ m ( t ) −∞ m = −∞ 10
Signal space intrepretation waveform → sequence sequence → waveform x ( t ) → x [ m ] x [ m ] → x ( t ) ∞ � { x [ m ] } → { φ m } → x = x [ m ] φ m x � φ m � x [ m ] = � x , φ m � m = −∞ projection onto an expansion over an orthonormal basis orthonormal basis waveform ⟷ vectors x ( t ) x � ∞ integration ⟷ inner product � u , v � u ( t ) v ∗ ( t ) d t −∞ 11
Part II. Pulse Amplitude Modulation A pragmatic approach to convert symbols to baseband waveforms and back 12
Modulation basis as time-shifted pulses { u m } Pulse x b ( t ) { u m } → { φ m ( t ) } → x b ( t ) Shaper ∞ 1 � x b ( t ) = u m p ( t − mT ) . φ m ( t ) = p ( t − mT ) , T = 2 W m = −∞ • T = 1/2 W : transmission interval • W : operational bandwidth • Desired properties of the pulse function p ( t ) : ‣ Time-limited (approximately) ‣ Band-limited 13
PAM modulation and demodulation ∞ { u m } Pulse x b ( t ) � x b ( t ) = u m p ( t − mT ) . Shaper m = −∞ 1 T = 2 W � ∞ Filter y b ( t ) u m = ˆ y b ( τ ) q ( mT − τ ) d τ q ( t ) −∞ • Key question: how to design the pulse p ( t ) and the filter q ( t ) ? 14
ISI-free condition when the channel is perfect ∞ { u m } Pulse x b ( t ) � x b ( t ) = u m p ( t − mT ) . Shaper m = −∞ 1 T = 2 W x b ( t ) x b ( τ ) � ∞ Filter y b ( t ) u m = ˆ y b ( τ ) q ( mT − τ ) d τ q ( t ) −∞ Want: ˆ A su ffi cient condition: u m = u m , ∀ m . ∞ � u m = ( x b ∗ q )( mT ) = ˆ u k g ( mT − kT ) � if ˆ 0 k � = 0 g (ˆ g ( t ) � ( p ∗ q )( t ) kT ) = k = −∞ if ˆ 1 k = 0 ∞ � = u k g (( m − k ) T )) k = −∞ 15
Ideal Nyquist and the Nyquist criterion A su ffi cient condition (in time domain) � if ˆ 0 k � = 0 g (ˆ kT ) = if ˆ 1 k = 0 An equivalent condition (in frequency domain) f − m � � rect( f ) � T rect( Tf ) = ˆ rect( Tf ) g T 1 m f − 1 1 2 2 16
�� � � � Nyquist criterion 1 T ≡ 2 W ˆ g ( f ) g ( f + m / T ) ˆ g ( f − m / T ) ˆ 1 · · · · · · · · · · · · f − 1 1 2 T ≡ − W 2 T ≡ W f − m � � � T rect( Tf ) = ˆ rect( Tf ) g T m Excessive bandwidth: ← this should not be too large B b − W Typical choice: W ≤ B b ≤ 2 W 17
Band-edge symmetry When taking the typical choice: W ≤ B b ≤ 2 W the Nyquist criterion can be simplified to the following band-edge symmetry : g ∗ ( W − ∆ ) + ˆ ˆ g ( W + ∆ ) = T, ∀ ∆ ∈ [0 , W ] T ✟ ✯ ✟ T − Re { ˆ T − ˆ g ( W − ∆ ) } g ( W b − ∆ )� Re { ˆ g ( f ) } g ( f )� ˆ Re { ˆ g ( W + ∆ ) } g ( W b + ∆ ) ˆ f ✟ ✟ ✙ B b W b W 0� � Re { ˆ g ( W − ∆ ) } + Re { ˆ g ( W + ∆ ) } = T ∀ ∆ ∈ [0 , W ] ⇐ ⇒ , Im { ˆ g ( W − ∆ ) } = Im { ˆ g ( W + ∆ ) } 18
Excessive bandwidth and rolloff factor Excessive bandwidth: B b − W B b Rollo ff factor: W − 1 T ✟ ✯ ✟ T − Re { ˆ T − ˆ g ( W − ∆ ) } g ( W b − ∆ )� Re { ˆ g ( f ) } g ( f )� ˆ Re { ˆ g ( W + ∆ ) } ˆ g ( W b + ∆ ) f ✟ ✙ ✟ B b W b W 0� 19
Raised cosine pulse time domain � � � 1 π if | f | = T 4 sinc , 2 β 2 β � g β ( t ) = � cos( πβ t � t T ) sinc otherwise , � 1 − 4 β 2 t 2 T T 2 rollo ff factor = β β = 0 Decay to zero with speed ∼ 1 t 3 as t → ∞ when β > 0 β = 0 . 3 β = 0 . 5 20
Raised cosine pulse frequency domain β = 0 if | f | ≤ 1 − β T 2 T if | f | > 1+ β g β ( f ) = ˆ 0 2 T 2 β ( | f | − 1 − β if 1 − β 2 T < | f | ≤ 1+ β T cos 2 ( π T 2 T )) 2 T β = 0 . 5 β = 0 . 3 rollo ff factor = β The larger it is, the smoother it transits from T to 0 in the frequency domain, and hence converges to zero faster in the time domain. 21
Choosing the shifted pulses as an orthonormal set • A theorem: p ( f ) | 2 satisfies the Nyquist Criterion { p ( t − mT ) : m ∈ Z } form an orthonormal set | ˆ ⇐ ⇒ • The principle of designing p ( t ) and q ( t ) p ( f ) | 2 satisfies the Nyquist Criterion Choose ˆ p ( f ) such that | ˆ ‣ Choose ˆ q ( f ) = ˆ p ∗ ( f ) If p ( t ) ∈ R (which is normally the case), then ˆ p ( − f ) and hence q ( f ) = ˆ p ∗ ( f ) = ˆ q ( t ) = p ( − t ) . ‣ For faster decay in the time-domain (less approximation error) in t = ⇒ need "larger room" for smoother transition from T to 0 in the frequency domain. 22
Part III. Quadrature Amplitude Modulation A pragmatic approach to convert baseband to passband waveforms and back 23
How to shift the frequency response? • We want to shift baseband signals to passband with center frequency f c : • Recall the frequency-shift property of Fourier Transform: F exp(j2 π f 0 t ) s ( t ) s ( f − f 0 ) ˆ ← → • So, a naive way is to multiply the signal by a complex sinusoid • But, at this point we don’t know how to implement a complex signal in real world • We can take the real part after multiplying with the complex sinusoid: Re { exp(j2 π f 0 t ) s ( t ) } = s ( t ) cos(2 π f c t ) s ( t ) ∈ R • But this is a waste of spectrum. imaginary part Re { ˆ s ( f ) } = Re { ˆ s ( − f ) } real part Im { ˆ s ( f ) } = − Im { ˆ s ( − f ) } | ˆ s ( f ) | = | ˆ s ( − f ) | ∠ ˆ s ( f ) = − ∠ ˆ s ( − f ) mod 2 π 24
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries