EE456 Digital Communications Professor Ha Nguyen September 2015 - PowerPoint PPT Presentation
Chapter 7: Basic Digital Passband Modulation EE456 Digital Communications Professor Ha Nguyen September 2015 EE456 Digital Communications 1 Chapter 7: Basic Digital Passband Modulation Introduction to Basic Digital Passband Modulation
Chapter 7: Basic Digital Passband Modulation EE456 – Digital Communications Professor Ha Nguyen September 2015 EE456 – Digital Communications 1
Chapter 7: Basic Digital Passband Modulation Introduction to Basic Digital Passband Modulation Baseband transmission is conducted at low frequencies. Passband transmission happens in a frequency band toward the high end of the spectrum. Satellite communication is in the 6–8 GHz band, while mobile phones systems are in the 800 MHz–2.0 GHz band. Bits are encoded as a variation of the amplitude , phase or frequency , or some combination of these parameters of a sinusoidal carrier . The carrier frequency is much higher than the highest frequency of the modulating signals (or messages). Shall consider binary amplitude-shift keying (BASK), binary phase-shift keying (BPSK) and binary frequency-shift keying (BFSK): Error performance, optimum receivers, spectra. Extensions to quadrature phase-shift keying (QPSK), offset QPSK (OQPSK) and minimum shift keying (MSK). EE456 – Digital Communications 2
Chapter 7: Basic Digital Passband Modulation Examples of Binary Passband Modulated Signals 0 0 0 1 0 (a) Binary data 1 1 1 1 1 (b) Modulating signal t 0 m t T T T T T T T T T ( ) 0 2 3 4 5 6 7 8 9 b b b b b b b b b V t (c) BASK signal 0 − V V t (d) BPSK signal 0 − V V t (e) BFSK signal 0 − V EE456 – Digital Communications 3
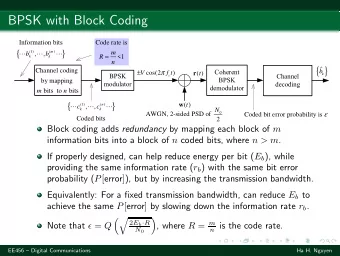
Chapter 7: Basic Digital Passband Modulation Binary Amplitude-Shift Keying (BASK) � s 1 ( t ) = 0 , “ 0 T ” “ 1 T ” , 0 < t ≤ T b , f c = n/T b s 2 ( t ) = V cos(2 πf c t ) , s 1 t s 2 t ( ) ( ) φ 1 t ( ) 0 E BASK ✁ ✂ ✄ t = T b r ≥ T ⇒ 1 T r r h D t b 1 ( ) ( ) ∫ • t 1 d Comparator r < T ⇒ 0 0 h D 1 φ 1 t ( ) N P E = + T BASK 0 ln 1 h E P 2 2 2 BASK (b) ⇐ Choose 0 Choose 1 T T ☎ s 1 t s 2 t ( ) ( ) T r = b r t φ t dt ( ) ( ) 1 1 0 � 0 E BASK 2 ✆ ✝ ✞ �� � �� � E BASK E b P [ error ] BASK = Q = Q , 2 N 0 N 0 where E b = 0 . 5 × 0 + 0 . 5 × E BASK = E BASK is the energy per bit . 2 EE456 – Digital Communications 4
Chapter 7: Basic Digital Passband Modulation PSD of BASK � � V 2 δ ( f − f c ) + δ ( f + f c ) + sin 2 [ πT b ( f + f c )] + sin 2 [ πT b ( f − f c )] S BASK ( f ) = . π 2 T b ( f + f c ) 2 π 2 T b ( f − f c ) 2 16 S f BASK ( ) V 2 16 f 1 1 f − f f + 0 c c c T T b b Approximately 95% of the total transmitted power lies in a band of 3 /T b (Hz), centered at f c . The carrier component could be helpful for frequency and phase synchronization at the receiver. EE456 – Digital Communications 5
Chapter 7: Basic Digital Passband Modulation Binary Phase-Shift Keying (BPSK) � s 1 ( t ) = − V cos(2 πf c t ) , if “ 0 T ” if “ 1 T ” , 0 < t ≤ T b , s 2 ( t ) = + V cos(2 πf c t ) , s 1 t s 2 t ( ) ( ) 0 2 φ = π t f t ( ) cos(2 ) c 1 T b E E BPSK BPSK �� �� � � 2 E BPSK 2 E b P [ error ] BPSK = Q = Q , N 0 N 0 where E b = 0 . 5 × E BPSK + 0 . 5 × E BPSK = E BPSK is the energy per bit . � sin 2 [ π ( f − f c ) T b ] � S BPSK ( f ) = V 2 + sin 2 [ π ( f + f c ) T b ] . 4 π 2 ( f − f c ) 2 ) T b π 2 ( f + f c ) 2 T b Similar to that of BASK, but no impulse functions at ± f c . EE456 – Digital Communications 6
Chapter 7: Basic Digital Passband Modulation Binary Frequency-Shift Keying (BFSK) ✘ ✙✘ ✟ ✠ ✡ ☛ ☞ ☞ ✌ ✍ ✎ ✏ ✑ ✒ ✓ ✕ ✔ s ( t ) ✟ ✠ ✡ ☛ ☞ ☞ ✌ ✍ ✎ ✏ ✖ ✒ ✓ ✕ ✗ ✘ ✑ ✘ ✒ ✌ ✕ � s 1 ( t ) = V cos(2 πf 1 t + θ 1 ) , if “ 0 T ” if “ 1 T ” , 0 < t ≤ T b . s 2 ( t ) = V cos(2 πf 2 t + θ 2 ) , (i) Minimum frequency separation for coherent orthogonality ( θ 1 = θ 2 ): 1 (∆ f ) [ coherent ] = . min 2 T b (ii) Minimum frequency separation for noncoherent orthogonality ( θ 1 � = θ 2 ): 1 (∆ f ) [ noncoherent ] = . min T b EE456 – Digital Communications 7
Chapter 7: Basic Digital Passband Modulation s 1 ( t ) s 2 ( t ) φ 1 ( t ) = √ E BFSK , φ 2 ( t ) = √ E BFSK . φ r t 2 ( ) 2 Decision boundary [ ] φ − φ P = t t P ( ) ( ) ( ) 2 when 2 1 2 1 E s 2 t 0, ( ) BFSK Choose 0 T ( ) Choose 1 E T BFSK ,0 r 1 φ t ( ) 0 s 1 t 1 ( ) �� �� � � E BFSK E b P [ error ] BFSK = Q = Q , N 0 N 0 where E b = 0 . 5 × E BFSK + 0 . 5 × E BFSK = E BFSK is the energy per bit . EE456 – Digital Communications 8
Chapter 7: Basic Digital Passband Modulation PSD of BFSK V 2 sin2[ πTb ( f + f 2)] sin2[ πTb ( f − f 2)] � � S BFSK ( f ) = δ ( f − f 2) + δ ( f + f 2) + + π 2 Tb ( f + f 2)2 π 2 Tb ( f − f 2)2 16 V 2 sin2[ πTb ( f + f 1)] sin2[ πTb ( f − f 1)] � � + δ ( f − f 1) + δ ( f + f 1) + + . π 2 Tb ( f + f 1)2 π 2 Tb ( f − f 1)2 16 W = f − f + T Bandwidth ( ) 3/ b 2 1 V V 2 2 16 16 1.5 1 1 1.5 ✚ f f f − f + f − f + 1 2 1 T 1 T 2 T 2 T b b b b EE456 – Digital Communications 9
Chapter 7: Basic Digital Passband Modulation Performance Comparison of BASK, BPSK and BFSK −1 10 −2 10 BASK and BFSK −3 10 P [error] BPSK −4 10 −5 10 −6 10 0 2 4 6 8 10 12 14 E b / N 0 (dB) �� �� � � 2 E b E b P [ error ] BPSK = Q , P [ error ] BASK = P [ error ] BFSK = Q . N 0 N 0 Question: You have designed a BPSK system that achieves P [ error ] = 10 − 6 . What needs to be changed if you want to double the transmission bit rate and still meet P [ error ] = 10 − 6 ? EE456 – Digital Communications 10
Chapter 7: Basic Digital Passband Modulation Comparison Summary of BASK, BPSK and BFSK The BER performance curves of BASK, BPSK and BFSK shown in the previous slide can only be realized with coherent receivers, i.e., when perfect carrier frequency and phase synchronization can be established at the receivers. A receiver that does not require phase synchronization is called a non-coherent receiver, which is simpler (hence less expensive) than a coherent receiver. Using the peaks of the first side lobes on both sides of the carrier frequency (or 2 frequencies in BFSK), the transmission bandwidths for BASK, BPSK and BFSK are approximated as: 3 W BASK = W BPSK ≈ = 3 r b T b � 3 . 5 r b , | f 2 − f 1 | + 3 coherently orthogonal W BFSK ≈ = 4 r b , non-coherently orthogonal T b Taking into account both bandwidth and power, BPSK is the best scheme if a coherent receiver can be afforded! This is followed by BASK and BFSK. The question is when would one use BASK or BFSK? The answers are as follows: If the carrier frequency can be synchronized, but not the phase, then BPSK does not work! On the contrary one can still use BASK but the receiver has to be redesigned to be a non-coherent receiver. See Assignment 7 (Problem 7.7), and the next few slides. Similarly, BFSK can be detected non-coherently without phase synchronization. EE456 – Digital Communications 11
Chapter 7: Basic Digital Passband Modulation Non-Coherent Detection of BASK � s R 1 ( t ) + w ( t ) = 0 + w ( t ) : “0 T ” � √ r ( t ) = 2 s R 2 ( t ) + w ( t ) = E cos(2 πf c t + θ ) + w ( t ) : “1 T ” T b Without the noise, the receiver sees one of the two signals � s R 1 ( t ) = 0 : “0 T ” √ � 2 s R 2 ( t ) = E T b cos(2 πf c t + θ ) : “1 T ” Write s R 2 ( t ) as follows: � � � � � √ � √ 2 2 s R 2 ( t ) = E cos θ cos(2 πf c t ) + E sin θ sin(2 πf c t ) . T b T b � �� � � �� � φ 1 ( t ) φ 2 ( t ) Thus, for an arbitrary θ two basis functions are required to represent s R 1 ( t ) and s R 2 ( t ) . The signal s R 1 ( t ) always lies at the origin, while s R 2 ( t ) could be anywhere on the circle √ of radius E , depending on θ . EE456 – Digital Communications 12
Chapter 7: Basic Digital Passband Modulation φ 2 t φ 2 t ( ) ( ) s R 2 t locus of ( ) s R s R 2 t 2 t ( ) ( ) E s 1 t θ s 1 t θ ( ) ( ) φ 1 t φ 1 t ( ) ( ) 0 0 D E 2 decision boundary decision boundary taking phase uncertaint y θ = assuming 0 into account (a) (b) (a) If the receiver assumes θ = 0 , the optimum decision boundary is a line perpendicular to √ E/ 2 away from s R φ 1 ( t ) and at distance 1 ( t ) . The error is: �� � �� � E 2 E P [ error ] = 0 . 5 Q + 0 . 5 Q [cos θ − 0 . 5] 2 N 0 N 0 (b) Without phase synchronization, the decision boundary is a circle centered at s R 1 ( t ) and with some diameter D . It can be shown that the optimum value of D is: √ � E � 1 + 4 N 0 � E D = √ ≈ (for high SNR) 2 E 2 E − The error probability is well approximated as P [ error ] ≈ 1 4 N 0 . 2 e EE456 – Digital Communications 13
Chapter 7: Basic Digital Passband Modulation t = T b r T b ( ) ∫ • 1 t d 0 Compute r t ( ) Decision r 2 + r 2 φ 1 t 1 2 ( ) t = T b D 2 and compare to r T b ( ) 2 ∫ • t d 0 φ 2 t ( ) 0 10 −1 10 Noncoherent Pr[error] −2 10 −3 10 θ =0 θ = π /6 θ = π /3 θ = π /2 −4 10 0 5 10 15 E b / N 0 (dB) EE456 – Digital Communications 14
Recommend

![Lecture no: 6 Receiver noise calculations [Covered briefly in Chapter 3 of textbook!]](https://c.sambuz.com/859635/lecture-no-6-s.webp)
More recommend
Explore More Topics
Stay informed with curated content and fresh updates.