Learning interpretable continuous-time models of latent stochastic dynamical systems Lea Duncker, Gerg˝ o Bohner, Julien Boussard, Maneesh Sahani Gatsby Computational Neuroscience Unit University College London ICML June 12, 2019
nonlinear stochastic dynamical system 1 x 2 0 0 1 x 1
nonlinear stochastic dynamical system 1 1 x 2 x 2 0 0 0 0 1 1 x 1 x 1 √ dx x = f x f f ( x x x ) dt + Σ dW W W
nonlinear stochastic dynamical system 1 x 2 0 0 1 x 1 √ dx x x = f f f ( x x x ) dt + Σ dW W W
nonlinear stochastic dynamical system 1 1 0 f f f ( s s s ) = 0 0 fixed point x 2 x 2 0 0 0 0 1 1 x 1 x 1 √ dx x = f x f f ( x x x ) dt + Σ dW W W
nonlinear stochastic dynamical system 1 1 0 f f f ( s s s ) = 0 0 fixed point x 2 x 2 f f ( x x x ) = f f f ( s s s ) + ∇ x f f f ( x ) | x = s ( x x x − s s s ) + ... f 0 0 0 0 1 1 x 1 x 1 √ dx x = f x f f ( x x x ) dt + Σ dW W W
nonlinear stochastic dynamical system 1 1 0 f f f ( s s s ) = 0 0 fixed point x 2 x 2 f f ( x x x ) = f f ( s f s ) + ∇ x f s f f ( x ) | x = s ( x x x − s s s ) + ... f ≈ J J J ( x x x − s s s ) Jacobian matrix 0 0 0 0 1 1 x 1 x 1 √ dx x = f x f f ( x x x ) dt + Σ dW W W
nonlinear stochastic dynamical system 1 1 0 f f f ( s s s ) = 0 0 fixed point x 2 x 2 f f ( x x x ) = f f ( s f s ) + ∇ x f s f ( x ) | x = s ( x f x x − s s s ) + ... f ≈ J J J ( x x x − s s s ) Jacobian matrix 0 0 0 0 1 1 x 1 x 1 √ dx x x = f f f ( x x x ) dt + Σ dW W W
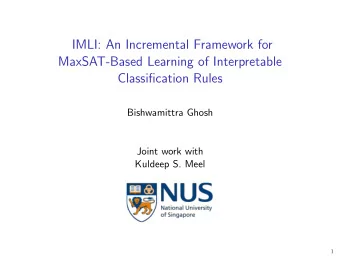
nonlinear stochastic dynamical system 1 1 0 f f f ( s s s ) = 0 0 fixed point x 2 x 2 f f ( x x x ) = f f ( s f s s ) + ∇ x f f f ( x ) | x = s ( x x − s x s s ) + ... f ≈ J J ( x J x − s x s s ) Jacobian matrix 0 0 interpretability: 0 0 1 1 x 1 x 1 ◮ stability analysis √ ◮ locally linearised dynamics dx x = f x f f ( x x x ) dt + Σ dW W W ◮ . . .
unevenly sampled high-d observations y 1 . . . y N time
unevenly sampled high-d observations y 1 . . . y N time
unevenly sampled high-d observations y 1 . . . y N time � y y ( t i ) � = g ( Cx y x x ( t i ) + d d d )
latent low-d unevenly sampled stochastic process high-d observations y 1 . . x ( t ) . y N time time √ � y y ( t i ) � = g ( Cx y x ( t i ) + d x d d ) dx x x = f f f ( x x ) dt + x Σ dW W W
latent low-d unevenly sampled stochastic process high-d observations y 1 . . x ( t ) . y N time time √ � y y ( t i ) � = g ( Cx y x ( t i ) + d x d d ) dx x x = f f f ( x x ) dt + x Σ dW W W
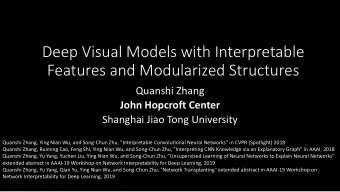
GP conditioned on latent low-d unevenly sampled interpretable features stochastic process high-d observations y 1 2 . . f ( x ) x ( t ) . 0 − 2 y N − 2 0 2 x time time √ � y y ( t i ) � = g ( Cx f k ∼ GP ( µ θ ( x x x ) , k θ ( x x x , x x ′ )) x y x x ( t i ) + d d d ) dx x = f x f f ( x x x ) dt + Σ dW W W
Variational q ( x x f f ) = q x ( x x x ) q f ( f f f ) x , f Bayes Archambeau (2007), Titsias (2009)
Variational q ( x x f f ) = q x ( x x x ) q f ( f f f ) x , f Bayes Archambeau (2007), Titsias (2009)
Variational q ( x x f f ) = q x ( x x x ) q f ( f f ) f x , f Bayes Gaussian Process Dynamics � � � � = P � u u u ,θ θ θ q u ( u u u ) du u u � N ( u u u | m m m u , S S S u ) sparse approx. with inducing variables Archambeau (2007), Titsias (2009)
Variational q ( x x f f ) = q x ( x x x ) q f ( f f f ) x , f Bayes Latent SDE path Gaussian Process Dynamics √ � x = ( − A ( t ) x x x + b x b ( t )) dt + b Σ dW W � � dx W � = P � u u u ,θ θ θ q u ( u u ) du u u u � q ( x x x ( t )) = N ( x x ( t ) | m x m m x ( t ) , S S S x ( t )) m x = − A ( t ) m ˙ m m m m x + b b ( t ) b S x A ( t ) T + Σ ˙ S x = − A ( t ) S S x − S S S S S N ( u u u | m m u , S m S S u ) sparse approx. Gaussian approx. with inducing variables with Markov structure Archambeau (2007), Titsias (2009)
Example: Van der Pol’s Oscillator x ) = 2 τ ( x 1 − 1 3 x 3 dynamics: f 1 ( x 1 − x 2 ) x f 2 ( x x x ) = τ 2 x 1
Example: Van der Pol’s Oscillator x ) = 2 τ ( x 1 − 1 3 x 3 dynamics: f 1 ( x 1 − x 2 ) x f 2 ( x x x ) = τ 2 x 1 2 x 2 0 − 2 − 2 0 2 x 1 true dynamics
Example: Van der Pol’s Oscillator x ) = 2 τ ( x 1 − 1 3 x 3 dynamics: f 1 ( x 1 − x 2 ) x f 2 ( x x x ) = τ 2 x 1 2 2 x 2 x 2 0 0 − 2 − 2 − 2 − 2 0 0 2 2 x 1 x 1 true dynamics
Example: Van der Pol’s Oscillator x ) = 2 τ ( x 1 − 1 3 x 3 dynamics: f 1 ( x 1 − x 2 ) x f 2 ( x x x ) = τ 2 x 1 2 2 0 5 x 2 x 2 0 0 0 − 5 19 0 1 samples of high-d output − 2 − 2 on 20 trials − 2 − 2 0 0 2 2 x 1 x 1 true dynamics
Example: Van der Pol’s Oscillator x ) = 2 τ ( x 1 − 1 3 x 3 dynamics: f 1 ( x 1 − x 2 ) x f 2 ( x x x ) = τ 2 x 1 2 x 2 0 − 2 − 2 0 2 x 1 true dynamics
Example: Van der Pol’s Oscillator x ) = 2 τ ( x 1 − 1 3 x 3 dynamics: f 1 ( x 1 − x 2 ) x f 2 ( x x x ) = τ 2 x 1 2 2 x 2 x 2 0 0 − 2 − 2 − 2 0 2 − 2 0 2 x 1 x 1 true dynamics learnt dynamics
Example: Van der Pol’s Oscillator x ) = 2 τ ( x 1 − 1 3 x 3 dynamics: f 1 ( x 1 − x 2 ) x f 2 ( x x x ) = τ 2 x 1 2 2 2 2 x 2 x 2 x 2 x 2 0 0 0 0 − 2 − 2 − 2 − 2 − 2 − 2 0 0 2 2 − 2 − 2 0 0 2 2 x 1 x 1 x 1 x 1 true dynamics learnt dynamics
limit cycles 2 2 x 2 x 2 0 0 − 2 − 2 − 2 0 2 − 2 0 2 x 1 x 1 true dynamics learnt dynamics
limit cycles double-well dynamics trial 1 2 2 true 1 . 5 learnt 1 x ( t ) f ( x ) 0 0 . 0 x 2 x 2 0 0 − 1 − 1 . 5 − 1 . 5 0 . 0 1 . 5 − 2 − 2 x 0 1 2 3 − 2 0 2 − 2 0 2 t x 1 x 1 true dynamics learnt dynamics
limit cycles double-well dynamics trial 1 2 2 true 1 . 5 learnt 1 x ( t ) f ( x ) 0 0 . 0 x 2 x 2 0 0 − 1 − 1 . 5 − 1 . 5 0 . 0 1 . 5 − 2 − 2 x 0 1 2 3 − 2 0 2 − 2 0 2 t x 1 x 1 true dynamics learnt dynamics multivariate point process 1 40 neuron number x 2 20 0 0 . 0 0 . 5 1 . 0 t 0 1 x 1
limit cycles double-well dynamics trial 1 2 2 true 1 . 5 learnt 1 x ( t ) f ( x ) 0 0 . 0 x 2 x 2 0 0 − 1 − 1 . 5 − 1 . 5 0 . 0 1 . 5 − 2 − 2 x 0 1 2 3 − 2 0 2 − 2 0 2 t x 1 x 1 true dynamics learnt dynamics multivariate point process chemical reaction dynamics 1 0 . 8 40 neuron number 180 0 . 6 10 x 2 x 2 0 . 4 20 5 235 0 . 2 0 0 0 0.5 0 . 0 0 . 0 0 . 5 1 . 0 t 0 . 0 0 . 2 0 . 4 0 . 6 0 . 8 0 1 x 1 x 1
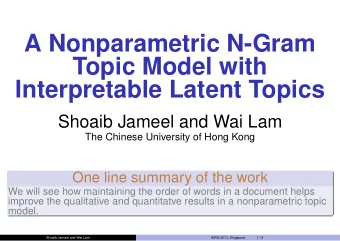
limit cycles double-well dynamics trial 1 2 2 true 1 . 5 learnt 1 x ( t ) f ( x ) 0 0 . 0 x 2 x 2 0 0 − 1 − 1 . 5 − 1 . 5 0 . 0 1 . 5 − 2 − 2 x 0 1 2 3 − 2 0 2 − 2 0 2 t x 1 x 1 true dynamics learnt dynamics Tonight @ Pacific Ballroom Poster #229 multivariate point process chemical reaction dynamics 1 0 . 8 40 neuron number 180 0 . 6 10 x 2 x 2 0 . 4 20 5 235 0 . 2 0 0 0 0.5 0 . 0 0 . 0 0 . 5 1 . 0 t 0 . 0 0 . 2 0 . 4 0 . 6 0 . 8 0 1 x 1 x 1
Gerg˝ o Bohner Julien Boussard Maneesh Sahani
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries