Last time 6.891 Computer Vision and Applications Projective SFM - PDF document
Last time 6.891 Computer Vision and Applications Projective SFM Projective spaces Prof. Trevor. Darrell Cross ratio Factorization algorithm Lecture 11: Model-based vision Hypothesize and test Euclidean upgrade
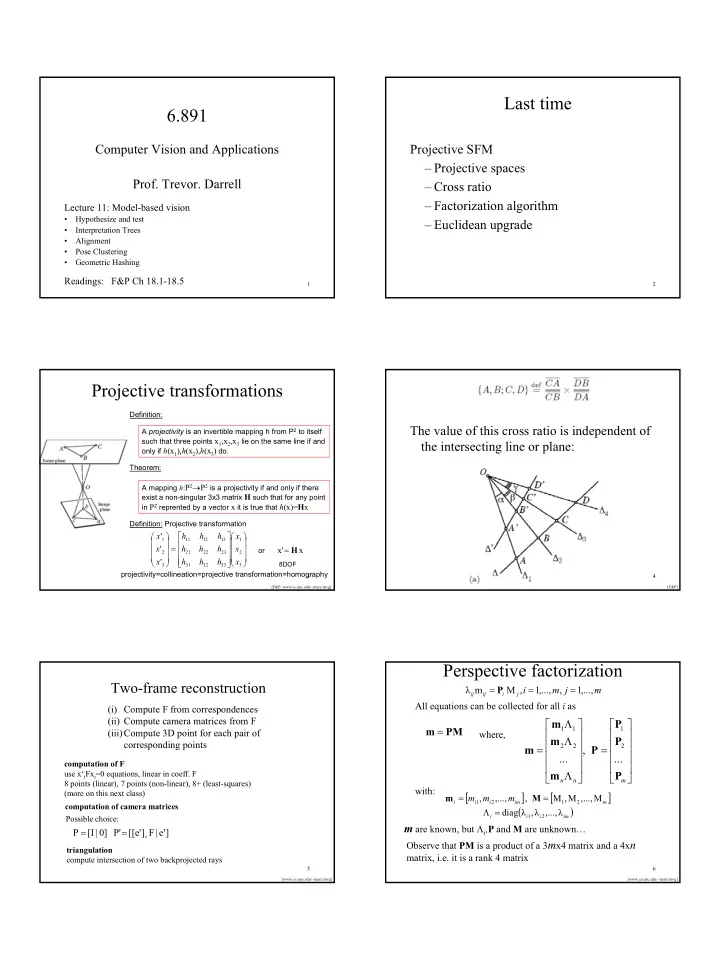
Last time 6.891 Computer Vision and Applications Projective SFM – Projective spaces Prof. Trevor. Darrell – Cross ratio – Factorization algorithm Lecture 11: Model-based vision • Hypothesize and test – Euclidean upgrade • Interpretation Trees • Alignment • Pose Clustering • Geometric Hashing Readings: F&P Ch 18.1-18.5 1 2 Projective transformations Definition: The value of this cross ratio is independent of A projectivity is an invertible mapping h from P 2 to itself such that three points x 1 ,x 2 ,x 3 lie on the same line if and the intersecting line or plane: only if h (x 1 ), h (x 2 ), h (x 3 ) do. Theorem: A mapping h : P 2 → P 2 is a projectivity if and only if there exist a non-singular 3x3 matrix H such that for any point in P 2 reprented by a vector x it is true that h (x)= H x Definition: Projective transformation x ' h h h x 1 11 12 13 1 x ' = h h h x x' = H x or 2 21 22 23 2 x ' h h h x 8DOF 3 31 32 33 3 projectivity=collineation=projective transformation=homography 3 4 [F&P, www.cs.unc.edu/~marc/mvg] [F&P] Perspective factorization Two-frame reconstruction = P = = λ m M , i 1 ,..., m , j 1 ,..., m ij ij i j All equations can be collected for all i as (i) Compute F from correspondences (ii) Compute camera matrices from F Λ m P m = 1 1 1 PM (iii)Compute 3D point for each pair of where, Λ m P corresponding points = 2 2 = 2 m , P ... ... computation of F use x‘ i Fx i =0 equations, linear in coeff. F Λ m P n n m 8 points (linear), 7 points (non-linear), 8+ (least-squares) with: (more on this next class) [ ] [ ] = = m m , m ,..., m , M M , M ,..., M i i 1 i 2 im 1 2 m computation of camera matrices ( ) Λ = diag λ , λ ,..., λ i i 1 i 2 im Possible choice: m are known, but Λ i , P and M are unknown… = = P [I | 0] P' [[e' ] F | e' ] × Observe that PM is a product of a 3 m x4 matrix and a 4x n triangulation matrix, i.e. it is a rank 4 matrix compute intersection of two backprojected rays 5 6 [www.cs.unc.edu/~marc/mvg] [www.cs.unc.edu/~marc/mvg] 1
Iterative perspective factorization When Λ i are unknown the following algorithm can be used: Euclidean upgrade 1. Set λ ij =1 (affine approximation). Given a camera with known intrinsic parameters, we 2. Factorize PM and obtain an estimate of P and M . If s 5 is can take the calibration matrix to be the identity and sufficiently small then STOP. write the perspective projection equation in some 3. Use m , P and M to estimate Λ i from the camera equations Euclidean world coordinate system as (linearly) m i Λ i = P i M 4. Goto 2. In general the algorithm minimizes the proximity measure for any non-zero scale factor λ . If M i and P j denote the P ( Λ , P , M )=s 5 shape and motion parameters measured in some Euclidean coordinate system, there must exist a 4 × 4 Structure and motion recovered up to an arbitrary projective matrix Q such that transformation 7 8 [www.cs.unc.edu/~marc/mvg] [F&P] Today: “Model-based Vision” Approach Still feature and geometry-based, but now • Given with moving objects rather than cameras… – CAD Models (with features) Topics: – Detected features in an image • Hypothesize and test recognition… – Hypothesize and test – Interpretation Trees – Guess – Alignment – Render – Pose Clustering – Compare – Invariances – Geometric Hashing 9 10 Features? Hypothesize and Test Recognition • Hypothesize object identity and correspondence • Points – Recover pose – Render object in camera but also, – Compare to image • Lines • Issues – where do the hypotheses come from? • Conics – How do we compare to image (verification)? • Other fitted curves • Regions (particularly the center of a region, etc.) 11 12 2
How to generate hypotheses? Interpretation Trees • Brute force • Tree of possible model-image feature assignments – Construct a correspondence for all object features to • Depth-first search every correctly sized subset of image points • Prune when unary (binary, …) constraint violated – Expensive search, which is also redundant. – length – L objects with N features – area – M features in image – orientation – O(LM N ) ! (a,1) • Add geometric constraints to prune search, leading (b,2) … to interpretation tree search … • Try subsets of features (frame groups)… 13 14 Interpretation Trees Adding constraints • Correspondences between image features and model features are not independent. • A small number of good correspondences yields a reliable pose estimation --- the others must be consistent with this. • Generate hypotheses using small numbers of correspondences (e.g. triples of points for a calibrated perspective camera, etc., etc.) “Wild cards” handle spurious image features [ A.M. Wallace. 1988. ] 15 16 Alignment Pose consistency / Alignment • Given known camera type in some unknown configuration (pose) – Hypothesize configuration from set of initial features – Backproject – Test • “Frame group” -- set of sufficient correspondences to estimate configuration, e.g., – 3 points – intersection of 2 or 3 line segments, and 1 point 17 18 3
Pose clustering • Each model leads to many correct sets of correspondences, each of which has the same pose • Vote on pose, in an accumulator array (per object) 19 20 Pose Clustering 21 22 Pose clustering pick feature pair Problems – Clutter may lead to more votes than the target! – Difficult to pick the right bin size Confidence-weighted clustering – See where model frame group is reliable (visible!) – Downweight / discount votes from frame groups at poses where that frame group is dark regions show reliable views of those unreliable… 23 24 features 4
25 26 27 28 Detecting 0.1% inliers among 99.9% outliers? Lowe’s Model verification step • Example: David Lowe’s SIFT-based Recognition system • Examine all clusters with at least 3 features • Goal: recognize clusters of just 3 consistent features • Perform least-squares affine fit to model. among 3000 feature match hypotheses • Discard outliers and perform top-down check for • Approach additional features. – Vote for each potential match according to model ID and pose • Evaluate probability that match is correct – Insert into multiple bins to allow for error in similarity – Use Bayesian model, with probability that features approximation would arise by chance if object was not present – Using a hash table instead of an array avoids need to – Takes account of object size in image, textured regions, form empty bins or predict array size model feature count in database, accuracy of fit (Lowe, CVPR 01) 29 30 [Lowe] [Lowe] 5
Solution for affine parameters Models for planar surfaces with SIFT keys: • Affine transform of [x,y] to [u,v]: • Rewrite to solve for transform parameters: 31 32 [Lowe] [Lowe] 3D Object Recognition Planar recognition • Extract outlines with background • Planar surfaces can be subtraction reliably recognized at a rotation of 60° away from the camera • Affine fit approximates perspective projection • Only 3 points are needed for recognition 33 34 [Lowe] [Lowe] 3D Object Recognition Recognition under occlusion • Only 3 keys are needed for recognition, so extra keys provide robustness • Affine model is no longer as accurate 35 36 [Lowe] [Lowe] 6
Robot Localization Location recognition • Joint work with Stephen Se, Jim Little 37 38 [Lowe] [Lowe] Map continuously built over time Locations of map features in 3D 39 40 [Lowe] [Lowe] Invariance Invariant recognition • There are geometric properties that are invariant to camera transformations • Affine invariants • Easiest case: view a plane object in scaled – Planar invariants orthography. – Geometric hashing • Assume we have three base points P_i on the • Projective invariants object – Determinant ratio – then any other point on the object can be written as • Curve invariants ( ) + µ kb P ( ) k = P 1 + µ ka P 2 − P 3 − P P 1 1 41 42 7
Recommend





More recommend
Explore More Topics
Stay informed with curated content and fresh updates.