GLOBAL ILLUMINATION ALGORITHMS Graphics & Visualization: - PowerPoint PPT Presentation
Graphics & Visualization Chapter 16 GLOBAL ILLUMINATION ALGORITHMS Graphics & Visualization: Principles & Algorithms Chapter 16 Introduction Global Illumination Algorithms: Deal with the realistic computation of light
Graphics & Visualization Chapter 16 GLOBAL ILLUMINATION ALGORITHMS Graphics & Visualization: Principles & Algorithms Chapter 16
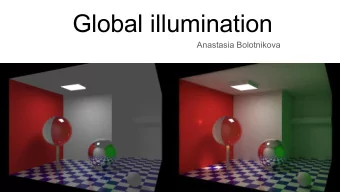
Introduction • Global Illumination Algorithms: Deal with the realistic computation of light transport in a scene Estimate indirect illumination, i.e. light reaching a point through multiple surface inter-reflections Compute both d irect illumination and indirect light • Images are radiometrically accurate and photorealistic • All aspects of the image-generator pipeline are based on physics: The reflection properties of all materials are described by BRDFs The light sources are radiometrically modeled The transport of light through the scene is computed accurately The display of the image uses accurate tone-mapping operators 2 Graphics & Visualization: Principles & Algorithms Chapter 16
The Physics of Light-Object Interaction II • The rendering equation : Is the most fundamental equation for photorealistic synthesis Expresses the equilibrium of light distribution in a 3D scene Takes into account: The radiometric specification of the light sources The BRDF specifications of all materials • It is an energy balance that expresses how much excitant radiance is present at a given surface point in a certain direction 3 Graphics & Visualization: Principles & Algorithms Chapter 16
Rendering Equation: Hemispherical Integration • BRDF at a surface point x : Expresses excitant radiance L r in direction ( φ r , θ r ) versus incident irradiance E i from direction ( φ i , θ i ): dL ( , ) dL ( , ) f ( , , , ) r r r r r r (16.1) r r r i i dE ( , ) L ( , )cos( ) d i i i i i i i i • Integrate Eq(16.1) over the hemisphere Ω i of all possible differential solid angles d ω i : dL ( , ) L ( , ) f ( , , , )cos( ) d r r r i i i r r r i i i i L ( , ) L ( , ) f ( , , , )cos( ) d r r r i i i r r r i i i i i 4 Graphics & Visualization: Principles & Algorithms Chapter 16
Rendering Equation: Hemispherical Integration (2) • Add a constant term, which corresponds to the self-emitted radiance L e ( φ r , θ r ) of point x • The complete rendering equation is: L ( , ) L ( , ) L ( , ) f ( , , , )cos( ) d r r r e r r i i i r r r i i i i i (16.2) 5 Graphics & Visualization: Principles & Algorithms Chapter 16
Rendering Equation: Surface-Area Integration • We can move from solid angle to surface integration domain • The integral is taken over all visible surfaces • Transform d ω i to the corresponding differential surface dA • Let y : the first visible surface point seen from point x in direction ( φ i , θ i ) ( φ i y θ y ) : the direction pointing from y towards x r xy : the distance between x and y S visible : the set of all visible surfaces as seen from x • Then: cos( ) dA y d i 2 r xy • Then L r becomes: cos( )cos( ) i y L ( , ) L ( , ) L ( , ) f ( , , , ) dA (16.3) r r r e r r S i i i r r r i i 2 r Visible xy 6 Graphics & Visualization: Principles & Algorithms Chapter 16
Rendering Equation: Surface-Area Integration (2) • Radiance remains constant along a straight line (no scattering), so we may replace received radiance with emitted radiance at the source: L ( , ) L ( , , ) L ( , , ) x y i i i i i i r y y • In equation Eq(16.3): the product of both cosine terms divided by r xy 2 is a geometric coupling term is dependent on the geometrical relationship between x and y is independent of the actual radiance distribution or BRDF's defined on the surfaces: cos( )cos( ) i y G ( , ) x y 2 r xy 7 Graphics & Visualization: Principles & Algorithms Chapter 16
Rendering Equation: Surface-Area Integration (3) • Substituting all of the above in Eq[16.3]: L ( , , ) L ( , , ) L ( , , ) f ( , , , ) ( , ) G dA x x y x y r r r e r r S r y y r r r i i Visible 8 Graphics & Visualization: Principles & Algorithms Chapter 16
Rendering Equation: Surface-Area Integration (4) • Integral over all surfaces is preferable to integral over visible surfaces only: Advantage: Single integration domain, identical for all points x • We introduce a visibility term V( x , y ): 1 , and are mutually invisible x y V( ) x,y 0 , otherwise • The rendering equation becomes: L ( , , ) L ( , , ) L ( , , ) f ( , , , ) ( , ) ( , ) G V dA x x y x y x y r r r e r r r y y r r r i i S S : the integration domain indicating all surface point y 9 Graphics & Visualization: Principles & Algorithms Chapter 16
Rendering Equation: Surface-Area Integration (5) • A special case: Direct illumination from one light source L ( , , ) L ( , , ) f ( , , , ) ( , ) ( , ) G V dA x y x y x y r r r S e y y r r r i i 1 S 1 : the surface area domain of the light source Direct illumination from more light sources: - Split the integral in a sum of integrals for each light source L L ( , , ) L ( , , ) f ( , , , ) ( , ) ( , ) G V dA x y x y x y r r r S e y y r r r i i j j 1 10 Graphics & Visualization: Principles & Algorithms Chapter 16
Rendering Equation: Surface-Area Integration (6) Direct illumination from one light source 11 Graphics & Visualization: Principles & Algorithms Chapter 16
Environment Map Illumination • The light source is encoded as a (hemi)-spherical environment map • An emitted radiance L e ( φ i , θ i ) is defined for each incoming direction L ( , ) L ( , ) f ( , , , )cos( ) d r r r e i i r r r i i i i i • Usually is given as a high dynamic range image • Can contain more than a million pixels 12 Graphics & Visualization: Principles & Algorithms Chapter 16
Discretized Form of the Rendering Equation • For some applications, it is useful to express: Light energy per surface patch (usually individual polygons) The hemisphere of all outgoing directions • Achieved by discretizing the rendering equation • We solve a linear system: each equation describes the energy balance of a single patch Radiosity algorithms • Note that not all of these algorithms use the radiosity B radiometric quantity 13 Graphics & Visualization: Principles & Algorithms Chapter 16
Discretized Form of the Rendering Equation (2) Assumptions for the formulation of radiosity equations: All surfaces in the scene are subdivided in surface patches The outgoing radiance is similar for all surface points on the patch The algorithm will compute only the average radiance of all surface points All surface patches have diffuse reflectance characteristics Each patch has only 1 radiance value as a final solution The light sources are considered to be diffuse as well (although this is not strictly necessary) 14 Graphics & Visualization: Principles & Algorithms Chapter 16
Discretized Form of the Rendering Equation (3) • Radiosity B for a single point x Is the flux per surface area, or Radiance integrated over the hemisphere of outgoing directions at x • Average radiosity B i emitted by a surface patch i with area A i : 1 B L ( , , )cos( ) d dA x i S r r r r i A i x i • On purely diffuse surfaces: self-emitted radiance L e and the BRDF f r do not depend on incoming or outgoing directions • Rendering equation for a surface point x: L ( ) L ( ) L ( , , ) f ( )cos( ) d x x x x r e i i i r i i x 15 Graphics & Visualization: Principles & Algorithms Chapter 16
Discretized Form of the Rendering Equation (4) • The incident radiance L i ( x , φ i , θ i ): depends on incident direction corresponds to the exitant radiance L r ( y ) emitted towards x by the point y visible from x along the direction ( φ i , θ i ) • The integral equation without any directions present: L ( ) L ( ) f ( ) G ( , ) ( , ) V L ( ) dA x x x x y x y y r e r r y S • In a diffuse environment: Radiosity and radiance are related B ( x ) = π L r ( x ) and B e ( x ) = π L e ( x ) 16 Graphics & Visualization: Principles & Algorithms Chapter 16
Recommend






![1 Ray Tracing - Bounding Volumes Ray Tracing - Bounding Volumes [Watt/Watt,235] [Watt/Watt,236]](https://c.sambuz.com/1008858/1-s.webp)

More recommend
Explore More Topics
Stay informed with curated content and fresh updates.