Exploiting Reductions Given an efficient algorithm for a problem A - PowerPoint PPT Presentation
T79.4201 Search Problems and Algorithms T79.4201 Search Problems and Algorithms Exploiting Reductions Given an efficient algorithm for a problem A we can solve a Lecture 5: Constraint satisfaction: formalisms problem B by developing a
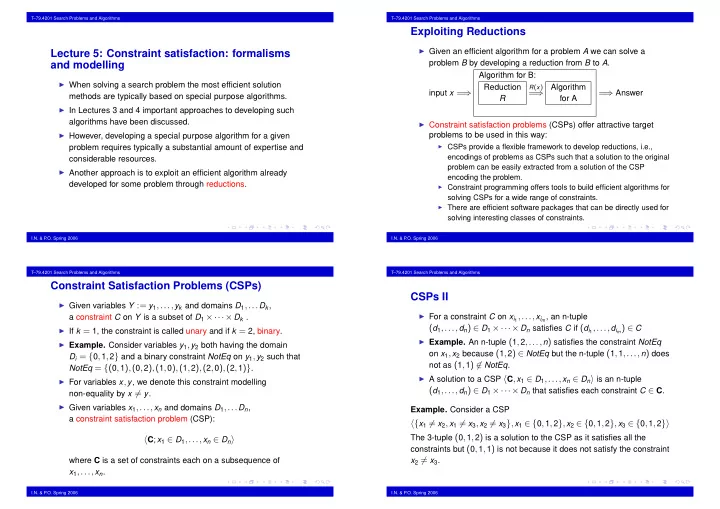
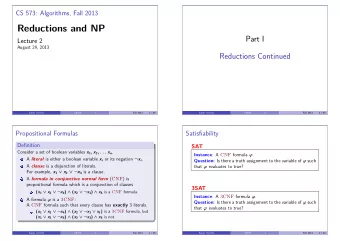
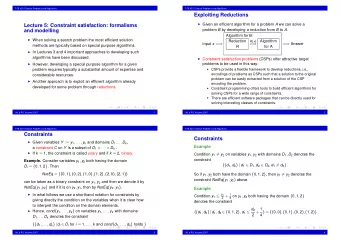
T–79.4201 Search Problems and Algorithms T–79.4201 Search Problems and Algorithms Exploiting Reductions ◮ Given an efficient algorithm for a problem A we can solve a Lecture 5: Constraint satisfaction: formalisms problem B by developing a reduction from B to A . and modelling Algorithm for B: ◮ When solving a search problem the most efficient solution R ( x ) Reduction Algorithm input x = ⇒ = ⇒ = ⇒ Answer R methods are typically based on special purpose algorithms. for A ◮ In Lectures 3 and 4 important approaches to developing such algorithms have been discussed. ◮ Constraint satisfaction problems (CSPs) offer attractive target ◮ However, developing a special purpose algorithm for a given problems to be used in this way: ◮ CSPs provide a flexible framework to develop reductions, i.e., problem requires typically a substantial amount of expertise and encodings of problems as CSPs such that a solution to the original considerable resources. problem can be easily extracted from a solution of the CSP ◮ Another approach is to exploit an efficient algorithm already encoding the problem. developed for some problem through reductions. ◮ Constraint programming offers tools to build efficient algorithms for solving CSPs for a wide range of constraints. ◮ There are efficient software packages that can be directly used for solving interesting classes of constraints. I.N. & P .O. Spring 2006 I.N. & P .O. Spring 2006 T–79.4201 Search Problems and Algorithms T–79.4201 Search Problems and Algorithms Constraint Satisfaction Problems (CSPs) CSPs II ◮ Given variables Y := y 1 ,..., y k and domains D 1 ,... D k , a constraint C on Y is a subset of D 1 ×···× D k . ◮ For a constraint C on x i 1 ,..., x i m , an n-tuple ( d 1 ,..., d n ) ∈ D 1 ×···× D n satisfies C if ( d i 1 ,..., d i m ) ∈ C ◮ If k = 1, the constraint is called unary and if k = 2, binary. ◮ Example. An n-tuple ( 1 , 2 ,..., n ) satisfies the constraint NotEq ◮ Example. Consider variables y 1 , y 2 both having the domain on x 1 , x 2 because ( 1 , 2 ) ∈ NotEq but the n-tuple ( 1 , 1 ,..., n ) does D i = { 0 , 1 , 2 } and a binary constraint NotEq on y 1 , y 2 such that not as ( 1 , 1 ) �∈ NotEq . NotEq = { ( 0 , 1 ) , ( 0 , 2 ) , ( 1 , 0 ) , ( 1 , 2 ) , ( 2 , 0 ) , ( 2 , 1 ) } . ◮ A solution to a CSP � C , x 1 ∈ D 1 ,..., x n ∈ D n � is an n-tuple ◮ For variables x , y , we denote this constraint modelling ( d 1 ,..., d n ) ∈ D 1 ×···× D n that satisfies each constraint C ∈ C . non-equality by x � = y . ◮ Given variables x 1 ,..., x n and domains D 1 ,... D n , Example. Consider a CSP a constraint satisfaction problem (CSP): �{ x 1 � = x 2 , x 1 � = x 3 , x 2 � = x 3 } , x 1 ∈ { 0 , 1 , 2 } , x 2 ∈ { 0 , 1 , 2 } , x 3 ∈ { 0 , 1 , 2 }� � C ; x 1 ∈ D 1 ,..., x n ∈ D n � The 3-tuple ( 0 , 1 , 2 ) is a solution to the CSP as it satisfies all the constraints but ( 0 , 1 , 1 ) is not because it does not satisfy the constraint x 2 � = x 3 . where C is a set of constraints each on a subsequence of x 1 ,..., x n . I.N. & P .O. Spring 2006 I.N. & P .O. Spring 2006
T–79.4201 Search Problems and Algorithms T–79.4201 Search Problems and Algorithms Example: SEND + MORE = MONEY ◮ Replace each letter by a different digit so that Example. Coloring problem SEND 9567 Given a graph G , the coloring problem can be encoded as a CSP as + MORE + 1085 follows. MONEY 10652 is a correct sum. The unique solution. ◮ For each node v i in the graph introduce a variable V i with the ◮ Variables: S, E, N, D, M, O, R, Y domain { 1 ,..., n } where n is the number of available colors. ◮ Domains: [1..9] for S, M and [0..9] for E, N, D, O, R, Y ◮ For each edge ( v i , v j ) in the graph introduce a constraint V i � = V j . ◮ Constraints: ◮ This is a reduction of the coloring problem to a CSP because the solutions to the CSP correspond exactly to the solutions of the 1000 · S + 100 · E + 10 · N + D coloring problem: + 1000 · M + 100 · O + 10 · R + E a tuple ( t 1 ,..., t n ) satisfying all the constraints gives a valid = 10000 · M + 1000 · O + 100 · N + 10 · E + Y coloring of the graph where node v i is colored with color t i . x � = y for every pair of variables x , y in {S, E, N, D, M, O, R, Y}. ◮ It is easy to check that the tuple ( 9 , 5 , 6 , 7 , 1 , 0 , 8 , 2 ) satisfies the constraints, i.e., is a solution to the problem. I.N. & P .O. Spring 2006 I.N. & P .O. Spring 2006 T–79.4201 Search Problems and Algorithms T–79.4201 Search Problems and Algorithms Constrained Optimization Problems ◮ Given: a CSP P := � C ; x 1 ∈ D 1 ,..., x n ∈ D n � and a function N Queens obj : Sol �→ R Problem: Place n queens on a n × n chess board so that they do not ◮ ( P , obj ) is a constrained optimization problem (COP) where the attack each other. task is to find a solution d to P for which the value obj ( d ) is ◮ Variables: x 1 ,..., x n ( x i gives the position of the queen on ith optimal. column) ◮ Example. KNAPSACK: a knapsack of a fixed volume and n ◮ Domains: [1..n] objects, each with a volume and a value. Find a collection of ◮ Constraints: for i ∈ [ 1 .. n − 1 ] and j ∈ [ i + 1 .. n ] : these objects with maximal total value that fits in the knapsack. (i) x i � = x j (rows) ◮ Representation as a COP: (ii) x i − x j � = i − j (SW-NE diagonals) Given: knapsack volume v and n objects with volumes a 1 ,..., a n (iii) x i − x j � = j − i (NW-SE diagonals) and values b 1 ,..., b n . ◮ When n = 10, the tuple ( 3 , 10 , 7 , 4 , 1 , 5 , 2 , 9 , 6 , 8 ) gives a solution Variables: x 1 ,..., x n to the problem. Domains: { 0 , 1 } Constraint: ∑ n i = 1 a i · x i ≤ v , Objective function: ∑ n i = 1 b i · x i . I.N. & P .O. Spring 2006 I.N. & P .O. Spring 2006
T–79.4201 Search Problems and Algorithms T–79.4201 Search Problems and Algorithms Solving CSPs Constraints ◮ Constraints have varying computational properties. ◮ For some classes of constraints there are efficient special ◮ In the course we consider more carefully two classes of purpose algorithms (domain specific methods/constraint solvers). constraints: linear constraints and Boolean constraints. Examples ◮ Linear constraints (Lectures 7–9) are an example of a class of ◮ Linear equations constraints which has efficient special purpose algorithms. ◮ Linear programming ◮ Now we consider Boolean constraints as an example of a class ◮ Unification for which we need to use general methods based on propagation ◮ For others general methods consisting of ◮ constraint propagation algorithms and and search. ◮ search methods ◮ However, boolean constraints are interesting because ◮ highly efficient general purpose methods are available for solving must be used. Boolean constraints; ◮ Different encodings of a problem as a CSP utilizing different sets ◮ they provide a flexible framework for encoding (modelling) where it of constraints can have substantial different computational is possible to use combinations of constraints (with efficient properties. support by solution techniques). ◮ However, it is not obvious which encodings lead to the best computational performance. I.N. & P .O. Spring 2006 I.N. & P .O. Spring 2006 T–79.4201 Search Problems and Algorithms T–79.4201 Search Problems and Algorithms Propositional formulas ◮ Syntax (what are well-formed propositional formulas): Boolean Constraints Boolean variables (atoms) X = { x 1 , x 2 ,... } Boolean connectives ∨ , ∧ , ¬ ◮ A Boolean constraint C on variables x 1 ,..., x n with the domain ◮ The set of (propositional) formulas is the smallest set such that all { true , false } can be seen as a Boolean function Boolean variables are formulas and if φ 1 and φ 2 are formulas, so f C : { true , false } n − → { true , false } such that a tuple ( t 1 ,..., t n ) are ¬ φ 1 , ( φ 1 ∧ φ 2 ) , and ( φ 1 ∨ φ 2 ) . satisfies the constraint C iff f C ( t 1 ,..., t n ) = true . For example, (( x 1 ∨ x 2 ) ∧¬ x 3 ) is a formula but (( x 1 ∨ x 2 ) ¬ x 3 ) is ◮ Typically such functions are represented as propositional not. formulas . ◮ A formula of the form x i or ¬ x i is called a literal where x i is a ◮ Solution methods for Boolean constraints exploit the structure of Boolean variable. the representation of the constraints as formulas. ◮ We employ usual shorthands: φ 1 → φ 2 : ¬ φ 1 ∨ φ 2 φ 1 ↔ φ 2 : ( ¬ φ 1 ∨ φ 2 ) ∧ ( ¬ φ 2 ∨ φ 1 ) φ 1 ⊕ φ 2 : ( ¬ φ 1 ∧ φ 2 ) ∨ ( φ 1 ∧¬ φ 2 ) I.N. & P .O. Spring 2006 I.N. & P .O. Spring 2006
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.