Energy Saving Approximations For Random Processes M. Lifshits August, 22 2016 (VI International Conference Modern Problems in Theoretical and Applied Probability) This is a joint work with I. Ibragimov from PDMI, E. Setterqvist from Link¨ oping university, Sweden, and Z. Kabluchko from M¨ unster university, Germany. M. Lifshits () Least energy approximation August, 22 2016 1 / 26
Example: running after a Brownian dog How to keep the Brownian dog on a leash in the energy saving mode? Let the dog walk in R according to a Brownian motion W ( t ) . You must follow it by moving with a finite speed and always stay not more than 1 away from the dog. If x ( t ) is your trajectory, then the goal is to follow the dog, i.e. keep | x ( t ) − W ( t ) | ≤ 1 and expend minimal kinetic energy per unit of time � T x ′ ( t ) 2 dt 1 T 0 in a long run, T → ∞ . M. Lifshits () Least energy approximation August, 22 2016 2 / 26
Diffusion strategy for the pursuit Let X ( t ) := x ( t ) − W ( t ) be the signed distance to the dog. A reasonable strategy is to determine the speed x ′ ( t ) as a function of X ( t ) by accelerating when X ( t ) approaches the boundary ± 1. So let x ′ ( t ) := b ( X ( t )) Then X becomes a stationary diffusion satisfying dX = b ( X ) dt − dW . One-dimensional diffusions are well understood. The density of the invariant measure is � x p ( x ) = C e B ( x ) , where B ( x ) := 2 b ( y ) dy . By ergodic theorem, in the stationary regime � T � 1 � 1 x ′ ( t ) 2 dt → 1 b ( x ) 2 p ( x ) dx = 1 p ( x ) 2 p ( x ) dx := 1 p ′ ( x ) 2 1 4 I ( p ) . T 4 4 0 − 1 − 1 We have to minimize Fisher information I(p) ! M. Lifshits () Least energy approximation August, 22 2016 3 / 26
Solution: optimal strategy Minimizing Fisher information on the interval is a classical problem arising in Statistics, Data Analysis, etc (Zipkin, Huber, Levit, Shevlyakov, etc). By simple variational calculus we obtain the optimal density p ( x ) = cos 2 ( π x / 2 ) , x ∈ [ − 1 , 1 ] , and the optimal speed strategy b ( x ) = − π tan ( π x / 2 ) exploding at the boundary. This leads to the asymptotic minimal reduced energy � T 4 I ( p ) = π 2 x ′ ( t ) 2 dt → 1 1 4 . T 0 M. Lifshits () Least energy approximation August, 22 2016 4 / 26
Non-adaptive setting: taut string � T � T 0 f ′ ( t ) 2 dt ց min 0 ϕ ( f ′ ( t )) dt ց min or(!!) f ( 0 ) = w ( 0 ) , f ( T ) = w ( T ) , w ( t ) − r ≤ f ( t ) ≤ w ( t ) + r , 0 ≤ t ≤ T . M. Lifshits () Least energy approximation August, 22 2016 5 / 26
Formal setting We consider uniform norms || h || T := sup | h ( t ) | , h ∈ C [ 0 , T ] , 0 ≤ t ≤ T and Sobolev-type norms (average kinetic energy) � T | h | 2 h ′ ( t ) 2 dt , T := h ∈ AC [ 0 , T ] . 0 Let W be a Brownian motion. We are mostly interested in its approximation characteristics I W ( T , r ) := inf {| h | T ; h ∈ AC [ 0 , T ] , || h − W || T ≤ r , h ( 0 ) = 0 } . M. Lifshits () Least energy approximation August, 22 2016 6 / 26
Main results for non-adaptive approximation Theorem r There exists C ∈ ( 0 , ∞ ) such that for any q > 0 if T → 0 , then √ r L q T 1 / 2 I W ( T , r ) − → C We may complete the mean convergence with a.s. convergence to C . Theorem For any fixed r > 0 , when T → ∞ , we have r T 1 / 2 I W ( T , r ) a.s. − → C . Main proof ideas: Gaussian concentration and subadditivity in time. M. Lifshits () Least energy approximation August, 22 2016 7 / 26
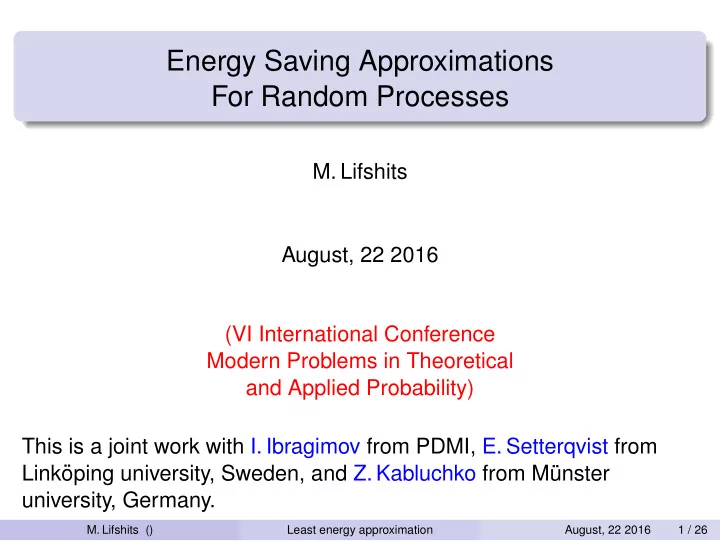
Empirical modelling of C 3000 2500 2000 1500 1000 500 0 0.54 0.56 0.58 0.6 0.62 0.64 0.66 0.68 0.7 0.72 C ≈ 0 . 63 Comparing to the optimal pursuit, 0 . 63 ≈ C ≤ π 2 ≈ 1 . 51 . This is a price to pay for not knowing the future. Theoretical lower and upper bounds for C are also available. M. Lifshits () Least energy approximation August, 22 2016 8 / 26
Upper bound: free-knot approximation � | W ( t ) − W ( τ n ) | ≥ 1 � � � Let τ n + 1 := inf t ≥ τ n Let h ( t ) interpolate 2 between the points ( τ n , W ( τ n )) . 3 ✻ 2 1 ✦✦✦✦✦✘✘✘✘✘✘✘✘❍❍❍❍✏✏✏✏✏✏❍ r r h 1 W 2 r r 0 r τ 1 τ 2 τ 3 τ 4 − 1 2 Then ∀ t we have | h ( t ) − W ( t ) | ≤ 1 and � τ n + 1 h ′ ( t ) 2 dt = ( h ( τ n + 1 ) − h ( τ n )) 2 1 = τ n + 1 − τ n 4 ( τ n + 1 − τ n ) τ n are i.i.d. random variables. M. Lifshits () Least energy approximation August, 22 2016 9 / 26
Free-knot approximation - numbers T On the long interval [ 0 , T ] we have approximately E τ 1 cycles, and the average energy of h on a cycle is E 1 4 τ 1 . By the Law of Large Numbers, | h | 2 E ( 1 τ 1 ) C 2 ≤ lim T = 4 E τ 1 . T T →∞ We are able to calculate both expectations. First, by Wald identity, E τ 1 = E W ( τ 1 ) 2 = 1 / 4 . Second, it is easy to see that 1 τ 1 is equidistributed with 4 sup 0 ≤ t ≤ 1 | W ( t ) | 2 . It remains to evaluate E sup 0 ≤ t ≤ 1 | W ( t ) | 2 . For exponential moment θ independent of W we have � ∞ x dx | W ( t ) | 2 = E sup | W ( t ) | 2 = E sup cosh ( x ) ≈ 1 . 832 . 0 ≤ t ≤ 1 0 ≤ t ≤ θ 0 √ Thus C ≤ 2 1 . 832 ≈ 2 . 7. M. Lifshits () Least energy approximation August, 22 2016 10 / 26
An extended setting: ”Pursuit under Potential” Consider a fixed time horizon [ 0 , T ] , introduce a penalty function (potential) Q ( · ) . Problem: find a pursuit process X ( · ) such that � T � X ′ ( t ) 2 + Q ( X ( t ) − W ( t )) � dt ց min E 0 among all adapted absolutely continuous random functions X . We also consider an infinite horizon problem stated as � T T →∞ T − 1 E � X ′ ( t ) 2 + Q ( X ( t ) − W ( t )) � lim dt ց min 0 By appropriate interpretation of Q this setting formally includes the Brownian dog problem, whenever � 0 , | y | ≤ 1 , Q ( y ) := + ∞ , | y | > 1 . M. Lifshits () Least energy approximation August, 22 2016 11 / 26
A strategy of optimal pursuit X ′ ( t ) := b ( X − W , T − t ) . Strategy: At every moment we determine the pursuit speed as a prescribed function of two arguments: the current distance from the target W and the remaining time T − t . We show that this kind of strategy is the best among all adapted strategies on every finite interval of time provided that the drift function b ( · , · ) is chosen properly. Consider the expected penalty function achievable on the time interval of length t when starting at the point X ( 0 ) = y , � t X ′ ( s ) 2 + Q ( X ( s ) − W ( s )) � � F ( y , t ) := E ds 0 � t � b ( Y ( s ) , t − s ) 2 + Q ( Y ( s )) � = ds . E 0 A version of Feynman-Kac formula leads to an equation quite close to Burgers equation. Therefore, Hopf–Cole transform F ( y , t ) := − 2 ln V ( y , t ) leads to some form of heat equation. M. Lifshits () Least energy approximation August, 22 2016 12 / 26
Heat equation and survival probability For the heat equation, we can find a good probabilistic solution, see Borodin and Salminen’s ”Handbook of Brownian motion”. We find there � t � � − 1 V ( y , t ) = E exp Q ( W y ( s )) ds , 2 0 where W y stands for a Brownian motion starting at a point y . This is the survival probability under killing rate Q ! For the Brownian dog � � problem we just have V ( y , t ) = P | W y ( s ) | ≤ 1 , 0 ≤ s ≤ t which, for large t , is nothing but small ball probability. Once the optimal energy F ( y , t ) is found, we may found the optimal speed strategy b ( y , t ) . Looking at the final result, we discover that the distortion Y = X − W of the optimal pursuit coincides with the Brownian motion conditioned to survive under the killing rate Q ! For the Brownian dog problem, we get the Brownian motion conditioned to stay in the strip [ − 1 , 1 ] . For quadratic potential Q ( y ) = y 2 we get b ( y , t ) = − tanh ( t ) y ∼ − y (for large t ) which corresponds to the Ornstein – Uhlenbeck process. M. Lifshits () Least energy approximation August, 22 2016 13 / 26
Infinite intervals We search an adapted and absolutely continuous pursuit X minimizing asymptotic energy per unit of time � T � X ′ ( t ) 2 + Q ( X ( t ) − W ( t )) � T →∞ T − 1 E lim dt . 0 Again, a natural candidate for being an optimal pursuit is a process X satisfying X ′ ( t ) := b ( X − W ) , where now the speed depends only on the distortion. This strategy is optimal provided that the drift function b ( · ) is chosen properly. Optimization arguments and the variable change b = V ′ / V lead to the eigenvalue problem for 1-dimensional Shr¨ odinger equation V ′′ ( y ) − Q ( y ) V ( y ) = − λ V ( y ) . We conclude that the minimal asymptotic energy in the stationary regime is equal to the minimal eigenvalue of the respective Shr¨ odinger equation, while the optimal speed function b ( y ) is equal to the log-derivative of the corresponding eigenfunction. M. Lifshits () Least energy approximation August, 22 2016 14 / 26
Generalization Brownian motion ր general process with stationary increments or a stationary process. Kinetic energy ր general form of energy. General potential Q ց quadratic potential Q ( y ) = α y 2 . This makes possible to consider the L 2 (or wide sense) setting. M. Lifshits () Least energy approximation August, 22 2016 15 / 26
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries