EmTOS An environment that includes mote s (running on TinyOS) and - PDF document
What is a Heterogeneous System? EmTOS An environment that includes mote s (running on TinyOS) and mic r s (more ose r ve r A Platform for Simulating expensive, high-power, low-distribution Heterogeneous Systems servers running on
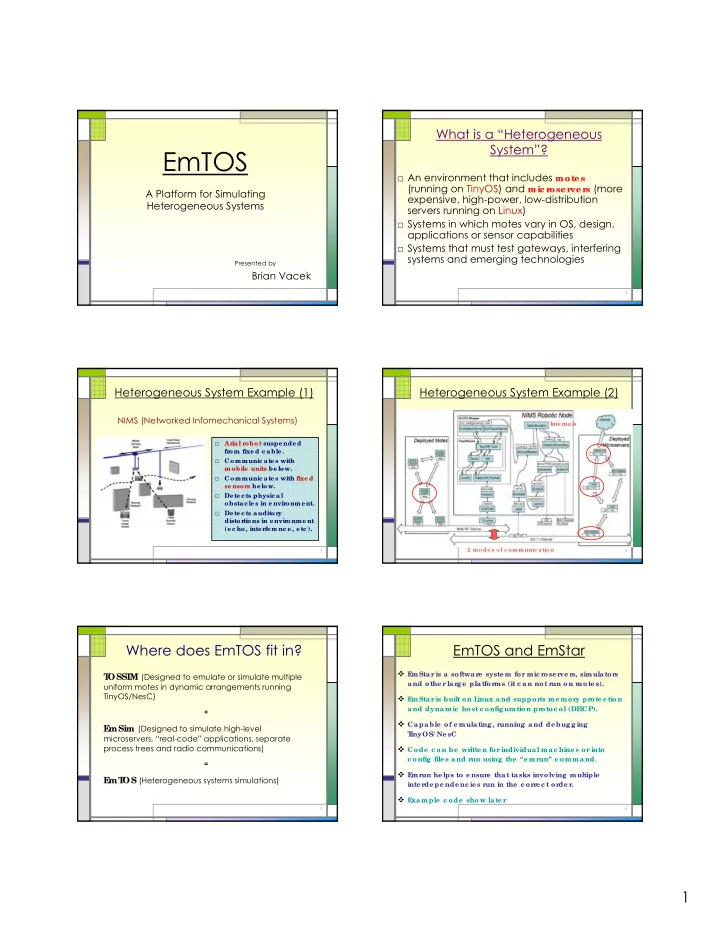
What is a “Heterogeneous System”? EmTOS □ An environment that includes mote s (running on TinyOS) and mic r s (more ose r ve r A Platform for Simulating expensive, high-power, low-distribution Heterogeneous Systems servers running on Linux) □ Systems in which motes vary in OS, design, applications or sensor capabilities □ Systems that must test gateways, interfering systems and emerging technologies Presented by Brian Vacek 1 2 Heterogeneous System Example (1) Heterogeneous System Example (2) NIMS (Networked Infomechanical Systems) Inte r na ls □ Arial robot suspe nde d from fixe d c a ble . □ Communic a te s with mobile units be low. □ Communic a te s with fixe d se nsors be low. □ De te c ts physic a l obsta c le s in e nvir onme nt. □ De te c ts a uditory distor tions in e nvironme nt (e c ho, inte rfe r e nc e , e tc ). 3 2 mode s of c ommunic a tion 4 Where does EmTOS fit in? EmTOS and EmStar � E OSSIM (Designed to emulate or simulate multiple mSta r is a softwa r e syste m for mic r ose r ve r s, simula tor s T a nd othe r la r g e pla tforms (it c a n not run on mote s). uniform motes in dynamic arrangements running TinyOS/NesC) � E mSta r is built on L inux a nd suppor ts me mory prote c tion a nd dyna mic host c onfig ur a tion pr otoc ol (DHCP). + � Ca pable of e mulating , running a nd de bug g ing mSim (Designed to simulate high-level E T inyOS/ Ne sC microservers, “real-code” applications, separate process trees and radio communications) � Code c a n be wr itte n for individua l ma c hine s or into c onfig file s a nd run using the “e mrun” c omma nd. = � E mr un he lps to e nsur e tha t ta sks involving multiple OS (Heterogeneous systems simulations) E mT inte r de pe nde nc ie s r un in the c or r e c t or de r . � E xa mple c ode show la te r 5 6 1
Additional Features Simulation Modes □ Allows mic r s to double a s mote s : Emulates □ Simula tion Mode : Models entire environment ose r ve r TinyOS/NesC on EmStar behaviorally on an EmTOS server. Each node stores services (no need to port or info in a config file: *L oc a tion *Or ie nta tion translate mote com protocol) *Ra dio Cha nne ls *Se nsors *Softwa r e HostMote □ Simula te a c tua l RF □ E mula tion Mode : Emulates instances of TinyOS/NesC c ommunic a tion : Can plug into in a EmTOS wrapper. a Linux server and open a real □ Re ad Mode : Actual motes/microservers interface RF channel with simulation server (through “stubs”) to collect □ Simula te mote s with dyna mic data, visualize, analyze and debug. c ode : Variable behavior and □ Hybrid Mode : A combination of emulation and real capabilities each represented mode. 7 8 Mode Diagrams: EmTOS Unified Visualization Ha r dwa r e : * E mvie w : A single screen that displays all nodes E mula te d L a ye r > Combina tion < Physic a l Node s (motes and microservers) as well as all connections between nodes and their > Combina tion < respectiveconnection qualities. *Information gathered from the simulation and debug stubs generates the image. *New application, services and states can be created using C/GTK. Softwa r e : Be ha viora l Analysis data can be printed to a log file. Mode l 9 10 Example Visualization Performance (1) Clock Jitter Conne c tion L ink line Sink Node Qua lity Timer Jitter – Unwanted variation in (c ommunic a tion) Ac tua l signal characteristics (timer) Mic a 2 Observations: • The real mote has high precision unless the timer is scheduled late due to computations or other tasks. • The EmTOS simulation has low E mT OS precision (due to the cap on the Linux Sim jiffy clock) but averages correctly. • While timer accuracy is not highly affected in practice, scheduling and interruptions are not well simulated. 11 12 2
Performance (2) Case Study: ESS Packet Latency □ A live test was performed using 14 ceiling-mounted mica2 motes with sensors in a 50x10m area (see Packet Latency – Round trip time of signal during sample figure in slide 8). ping. □ All four modes were tested for 90 minute runs with each node asked to determine the “best” route to Observations: a sink node (with either 1 or 2 sinks available) • The HostMote protocol incurred an overhead of 8 bytes per Re sults: packet. - Emulation and Simulation performed faster than • EmTOS incurred an additional was actually observed in practice. 60ms overhead in emulating the necessary hardware - Increasing the number of sink points, only processes. marginally improves shortest path! Are glitches part of ESS or EmTOS? 13 14 Graphed Results from ESS Test Critiques □ □ Re la tive ly unte ste d Sing le vs multi- thr e a de d (active user base ~100) syste ms inc onsistanc ie s (simulated motes can □ Sc a r c e doc ume nta tion disobey interrupt rules) (Tutorial site still under production) □ Pa ra lle l simula tions not □ ye t possible L imite d sc ale (performance limited to □ Obje c t inte rfe re nc e not <500 nodes) fully supporte d (simulated obstacles do □ imite d Support (yet to L not affect the network make compatible with realistically) SOS and some others) Note tha t Simula tion a nd E mula tion Mode pe rfor m □ □ ime r (by an De bug g ing re a da bility Ina c c ura te T similarly and that Hybr id and Re a l Mode pe rform (one large log file) order of magnitude) simila rly (a s would be e xpe c te d). 15 16 Comparison to TOSSIM Code Sample Code c a n be wr itte n in Ne sC a nd e mula te d or wr itte n in □ EmTOS has many advantages in terms of flexibility the E msta r fr a me wor k. and adaptability for complicated situations that require a variety of sensor types or functions. # Builds TinyOS executable from within an EmStar build file build tos { target CntToLedsAndRfm { tinyos-1.x/apps/CntToLedsAndRfm } } □ EmTOS interface better with higher-level devices like microservers or gateways. # -*- Mode: C -*- # Cnt.run # Emruntab that runs CountToLedsAndRfm in EmTOS □ TOSSIM still performs better in networks requiring include mote/mote.run large dense distributions of uniforms motes. &mote_hostmote(/dev/ttyS0,mica2,0); □ TOSSIM has higher reliability and data realism (within &mote_motenic(mote0,0,show="leds"); # Wires to Transceiver its limited scope). process CntTLaR { □ TOSSIM is clearer and more accurate with error type = daemon; detection and reporting. waitfor = mote0; cmd = "mote/CntToLedsAndRfm"; # Runs LED application } 17 18 3
Questions or Comments References □ Are heterogeneous systems clearly the way of the □ L. Girod, T. Stathopoulos, N. Ramanathan, J. Elson, D. Estrin, E. Osterweil, and T. Schoellhammer, A System for Simulation, Emulation, and Deployment of future? Would added cost endanger EmTOS? Heterogeneous Sensor Networks, ACM Conference on Embedded Networked Sensor Systems (SenSys), November 2004. □ What is TOSSIMs solution to heterogeneous systems? (All images except NIMS came from the above article) Does EmTOS have other potential rivals? □ P. Levis, N. Lee, M. Welsh, and D. Culler, TOSSIM: Accurate and Scalable Simulation of Entire TinyOS Applications, ACM Conference on Embedded □ How can the visual interface or debugging files be Networked Sensor Systems (SenSys), November 2003. made most clear and useful? □ http://research.cens.ucla.edu/projects/2006/Systems_Infrastructure/Emstar/de fault.htm □ What are some practical uses for EmTOS? Where □ http://cvs.cens.ucla.edu/emstar/tut/samples/index.html (code sample) would it be impractical? □ http://research.cens.ucla.edu/portal/page?_pageid=56,48345,56_48347&_da d=portal&_schema=PORTAL □ Do you think there is a target mote:microserver ratio (NIMS image) that is most efficient? □ Can EmTOS be used to simulate mobile agents? 19 20 4
Recommend



More recommend
Explore More Topics
Stay informed with curated content and fresh updates.