Chenyang Lu Highlight Commonclassofcompu5ngproblems - PDF document
Chenyang Lu Highlight Commonclassofcompu5ngproblems CPUU%liza%onControlin MIMO:mul5input(knobs),mul5output(objec5ves) DistributedRealTimeSystems
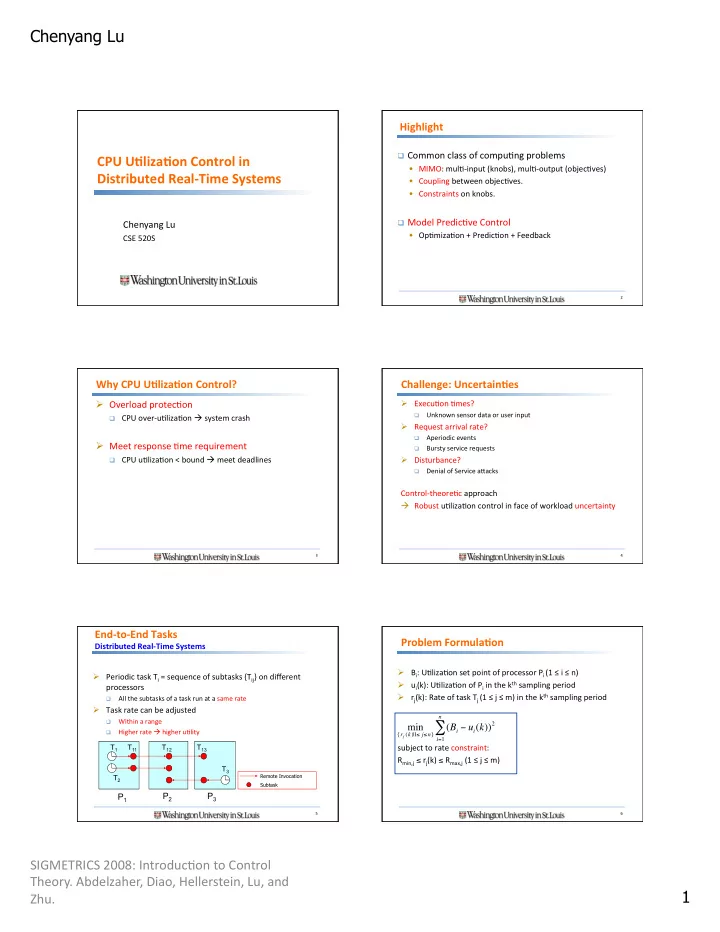
Chenyang Lu Highlight Common class of compu5ng problems CPU U%liza%on Control in • MIMO: mul5‐input (knobs), mul5‐output (objec5ves) Distributed Real‐Time Systems • Coupling between objec5ves. • Constraints on knobs. Model Predic5ve Control Chenyang Lu • Op5miza5on + Predic5on + Feedback CSE 520S 2 Why CPU U%liza%on Control? Challenge: Uncertain%es Overload protec5on Execu5on 5mes? Unknown sensor data or user input CPU over‐u5liza5on system crash Request arrival rate? Aperiodic events Meet response 5me requirement Bursty service requests CPU u5liza5on < bound meet deadlines Disturbance? Denial of Service a^acks Control‐theore5c approach Robust u5liza5on control in face of workload uncertainty 3 4 End‐to‐End Tasks Problem Formula%on Distributed Real‐Time Systems B i : U5liza5on set point of processor P i (1 ≤ i ≤ n) Periodic task T i = sequence of subtasks {T ij } on different u i (k): U5liza5on of P i in the k th sampling period processors r j (k): Rate of task T j (1 ≤ j ≤ m) in the k th sampling period All the subtasks of a task run at a same rate Task rate can be adjusted n Within a range ∑ ( B i − u i ( k )) 2 min Higher rate higher u5lity { r j ( k )|1 ≤ j ≤ n } i = 1 subject to rate constraint: T 1 T 11 T 12 T 13 R min,j ≤ r j (k) ≤ R max,j (1 ≤ j ≤ m) T 3 T 2 Remote Invocation Subtask P 2 P 3 P 1 5 6 SIGMETRICS 2008: Introduc5on to Control Theory. Abdelzaher, Diao, Hellerstein, Lu, and 1 Zhu.
Chenyang Lu Single‐Input‐Single‐Output (SISO) Control New in Distributed Systems Single Processor Need to control u5liza5on of mul5ple processors U5liza5on of different processors are coupled with each other due to end‐to‐end tasks Sensor Inputs Replica5ng a SISO controller on all processors does not work! Constraints on task rates {r(k+1)} Set point Application Controller Actuator U s = 69% Middleware u(k) Task Rates T 1 T 11 T 12 T 13 R 1 : [1, 5] Hz Monitor OS R 2 : [10, 20] Hz T 3 Processor T 2 P 2 P 3 P 1 C. Lu, X. Wang, and C. Gill, Feedback Control Real-Time Scheduling in ORB Middleware, IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS'03), May 2003. 7 8 EUCON: Mul%‐Input‐Mul%‐Output Control Control Theore%c Methodology 1. Derive a dynamic model of the system Measured Output 2. Design a controller Distributed System 3. Analyze stability (m tasks, n processors) Utilization UM UM Model Monitor Predictive Rate Controller Modulator RM RM Feedback Loop Control Remote Invocation Input Subtask C. Lu, X. Wang and X. Koutsoukos, Feedback Utilization Control in Distributed Real-Time Systems with End-to-End Tasks, IEEE Transactions on Parallel and Distributed Systems, 16(6): 550-561, June 2005. 9 10 Dynamic Model: One Processor Dynamic Model: Mul%ple Processors u ( k ) = u ( k -1) + GF Δ r ( k -1) ∑ u i ( k ) = u i ( k − 1) + g i c jl Δ r j ( k − 1) G: diagonal matrix of u5liza5on gains T jl ∈ S i F : subtask alloca5on matrix models the coupling among processors S i : set of subtasks on P i f ij = c jl if task T j has a subtask T jl on processor P i c jl : es5mated execu5on 5me of T il f ij = 0 if T j has no subtask on P i g i : u5liza5on gain of P i T 1 T 11 ra5o between actual and es5mated change in u5liza5on T 22 models uncertainty in execu5on 5mes T 3 T 2 T 21 T 31 P 1 P 2 11 12 SIGMETRICS 2008: Introduc5on to Control Theory. Abdelzaher, Diao, Hellerstein, Lu, and 2 Zhu.
Chenyang Lu Model Predic%ve Control Cost Func%on Cost Suitable for coupled MIMO control problems with constraints. P M − 1 Compute input to minimize cost over a future interval. 2 2 ∑ ∑ V ( k ) = u ( k + i ) − ref ( k + i ) + Δ r ( k + i ) − Δ r ( k + i − 1) Cost func5on: tracking error and control cost. i = 1 i = 0 Predict cost based on a system model and feedback. Tracking Error Control Cost Compute input subject to constraints. Op5miza5on + Predic5on + Feedback Reference trajectory: exponen5al convergence to B − T s i T ref ref ( k + i ) = B − e ( B − u ( k )) 13 14 Model Predic%ve Controller EUCON Controller Constrained At the end of each sampling period op5miza5on Compute inputs in future sampling periods solver Δ r (k), Δ r (k+1), ... Δ r (k+M‐1) to minimize the cost func5on Cost is predicted using (1) feedback u(k‐1) (2) approximate dynamic model Apply Δ r (k) to the system At the end of the next sampling period Desired trajectory for Shil 5me window and re‐compute Δ r (k+1), Δ r (k+2), ... Δ r (k+M) based Difference from u (k) to converge to B on feedback reference trajectory 15 16 Stable System Stability Analysis Stability: u5liza5on of all processors converge to set points Derive stability condi5on range of G Tolerable varia5on of execu5on 5mes Provides analy5cal assurance despite uncertainty execu5on 5me factor = 0.5 (actual execu5on 5mes = ½ of es5mates) 17 18 SIGMETRICS 2008: Introduc5on to Control Theory. Abdelzaher, Diao, Hellerstein, Lu, and 3 Zhu.
Chenyang Lu Unstable System Stability Stability condi5on tolerable range of execu5on 5mes Analy5cal assurance on u5liza5ons despite uncertainty Overes%ma%on Predicted of execu%on bound for %mes prevents stability execu5on 5me factor = 7 oscilla%on (actual execu5on 5mes = 7 5mes es5mates) actual execution time / estimation 19 20 FC‐ORB Middleware FC‐ORB Features End‐to‐end u5liza5on control Maintains desired u5liza5ons on all processors Model Measured Predic%ve End‐to‐end ORB architecture Control Output Controller Input Specialized for rate adapta5on Feedback lane Task migra5on Reliability in terms of func5onality and real‐5me performance Rate Rate Rate Modulator Modulator Modulator Priority Priority Priority Manager Manager Manager U%liza%on U%liza%on U%liza%on Monitor Monitor Monitor Remote request lanes Remote request lanes X. Wang, C. Lu and X. Koutsoukos, Enhancing the Robustness of Distributed Real-Time Middleware via End-to-End Utilization Control, IEEE Real-Time Systems Symposium (RTSS'05), December 2005. 21 22 End‐to‐End U%liza%on Control Service End‐to‐End Object Request Broker � Release guard for end‐to‐end tasks Implements EUCON (End‐to‐end U5liza5on CONtrol) Provides func5onal and performance portability Priority management Rate adapta5on con5nuous priority changes Thread‐per‐priority high overhead Thread‐per‐subtask: Change priority only when the order of task Controlled Model Manipulated variables: Predictive variables: rate changes � Controller Utilizations Rate changes Rate Rate Rate Modulator Modulator Modulator Rate Rate Rate Priority Priority Priority Modulator Modulator Modulator Manager Manager Manager Priority Priority Priority Manager Manager Manager Utilization Utilization Utilization Monitor Monitor Monitor Utilization Utilization Utilization Monitor Monitor Monitor Remote request lanes Remote request lanes Remote request lanes Remote request lanes 23 24 SIGMETRICS 2008: Introduc5on to Control Theory. Abdelzaher, Diao, Hellerstein, Lu, and 4 Zhu.
Recommend


More recommend
Explore More Topics
Stay informed with curated content and fresh updates.