
EE3CL4: Compensator Design Introduction to Linear Control Systems - PowerPoint PPT Presentation
EE 3CL4, 9 1 / 56 Tim Davidson Frequency Domain Approach to EE3CL4: Compensator Design Introduction to Linear Control Systems Lead Compensators Section 9: Design of Lead and Lag Compensators using Lag Frequency Domain Techniques
EE 3CL4, §9 1 / 56 Tim Davidson Frequency Domain Approach to EE3CL4: Compensator Design Introduction to Linear Control Systems Lead Compensators Section 9: Design of Lead and Lag Compensators using Lag Frequency Domain Techniques Compensators Lead-Lag Compensators Tim Davidson McMaster University Winter 2020
EE 3CL4, §9 2 / 56 Outline Tim Davidson Frequency Domain Approach to Compensator 1 Frequency Domain Approach to Compensator Design Design Lead Compensators Lead 2 Lag Compensators Compensators Lead-Lag Compensators 3 Lag Compensators Lead-Lag 4 Compensators
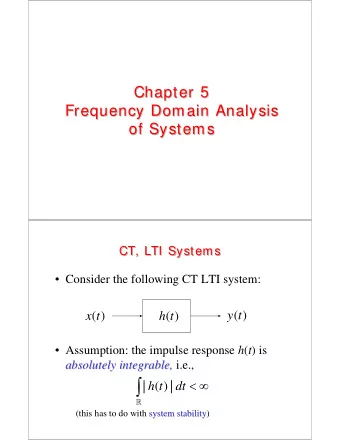
EE 3CL4, §9 4 / 56 Frequency domain design Tim Davidson Frequency Domain Approach to Compensator Design Lead Compensators • Analyze closed loop using open loop transfer function Lag L ( s ) = G c ( s ) G ( s ) H ( s ) . Compensators Lead-Lag • We would like closed loop to be stable: Compensators • Use Nyquist’s stability criterion (on L ( s ) ) • We might like to make sure that the closed loop remains stable even if there is an increase in the gain • Require a particular gain margin (of L ( s ) ) • We might like to make sure that the closed loop remains stable even if there is additional phase lag • Require a particular phase margin (of L ( s ) ) • We might like to make sure that the closed loop remains stable even if there is a combination of increased gain and additional phase lag
EE 3CL4, §9 5 / 56 Robust stability Tim Davidson Frequency Domain Approach to Compensator Design • Let ˘ G ( s ) denote the true plant and let G ( s ) denote our model Lead Compensators • ∆ G ( s ) = ˘ G ( s ) − G ( s ) denotes the uncertainty in our model Lag Compensators • If ˘ G ( s ) has the same number of RHP poles as G ( s ) , we need to Lead-Lag ensure that the Nyquist plot of Compensators ˘ L ( s ) = G c ( s )˘ G ( s ) = L ( s ) + G c ( s )∆ G ( s ) has the same number of encirclements of − 1 as the plot of L ( s ) . • This will give us a sufficient condition for robust stability
EE 3CL4, §9 6 / 56 Robust stability II Tim Davidson Frequency Domain Approach to Compensator Design Lead Compensators Lag Compensators Lead-Lag Compensators
EE 3CL4, §9 7 / 56 Robust stability III Tim Davidson Frequency Domain Approach to Compensator Design Lead Compensators • Our sufficient condition is | 1 + L ( j ω ) | > | G c ( j ω )∆ G ( j ω ) | . Lag Compensators � � � ∆ G ( j ω ) 1 • That is equivalent to | L ( j ω ) + 1 | > � � Lead-Lag G ( j ω ) � Compensators • That is, we need | L ( j ω ) | to be small at the frequencies where the relative error in our model is large; typically at higher frequencies
EE 3CL4, §9 8 / 56 Frequency domain design Tim Davidson Frequency Domain Approach to Compensator Design • We might like to control the damping ratio of the dominant Lead Compensators pole pair Lag Compensators • Use the fact that φ pm = f ( ζ ) ; Lead-Lag Compensators • We might like to control the steady-state error constants • For step, ramp and parabolic inputs, these constants are related to the behaviour of L ( s ) around zero; i.e., behaviour near DC. Recall K posn = L ( 0 ) and K v = lim s → 0 sL ( s ) . • We might like to influence the settling time • Roughly speaking, the settling time decreases with increasing closed-loop bandwidth. How is this related to bandwidth of L ( s ) ?
EE 3CL4, §9 9 / 56 Bandwidth Tim Davidson Frequency Domain Approach to • Let ω c be the (open-loop) cross-over frequency; Compensator Design i.e., | L ( j ω c ) | = 1 Lead Compensators • Let T ( s ) = Y ( s ) L ( s ) R ( s ) = 1 + L ( s ) . Lag Compensators • Consider a low-pass open loop transfer function Lead-Lag Compensators • When ω ≪ ω c , | L ( j ω ) | ≫ 1, = ⇒ T ( j ω ) ≈ 1 • When ω ≫ ω c , | L ( j ω ) | ≪ 1, = ⇒ T ( j ω ) ≈ L ( j ω ) • Can we quantify things a bit more, and perhaps gain some insight, for a standard second-order system
EE 3CL4, §9 10 / 56 Bandwidth, open loop Tim Davidson ω 2 • For a standard second-order system, L ( s ) = n s ( s + 2 ζω n ) Frequency Domain ω n / ( 2 ζ ) • To sketch open loop Bode diagram, L ( j ω ) = Approach to � � Compensator j ω 1 + j ω/ ( 2 ζω n ) Design • Low freq’s: slope of − 20 dB/decade; Corner freq. at 2 ζω n ; Lead High freq’s: slope of − 40dB/decade Compensators 1 + 4 ζ 4 − 2 ζ 2 � 1 / 2 �� • Crossover frequency: ω c = ω n Lag Compensators Lead-Lag Compensators Circles are the corner frequencies; Observe crossover frequencies
EE 3CL4, §9 11 / 56 Bandwith, closed loop Tim Davidson • To sketch closed-loop Bode diagram, T ( j ω ) = 1 1 + j 2 ζω/ω n − ( ω/ω n ) 2 Frequency Domain • Low freq’s: slope of zero; Double corner frequency at ω n ; Approach to High freq’s: slope of − 40dB/decade Compensator √ Design 1 − 2 ζ 2 (Lab 2) 1 � • For ζ < 1 / 2 ζ √ 2, peak of 1 − ζ 2 at ω r = ω n Lead Compensators 2 − 4 ζ 2 + 4 ζ 4 + 1 − 2 ζ 2 � 1 / 2 , • 3dB bandwidth: ω B = ω n �� Lag ≈ ω n ( − 1 . 19 ζ + 1 . 85 ) for 0 . 3 ≤ ζ ≤ 0 . 8. Compensators Lead-Lag Compensators Asterisks are ω B
EE 3CL4, §9 12 / 56 Bandwidth, open and closed Tim Davidson loops Frequency Domain Approach to Compensator Design Lead Compensators Lag Compensators Lead-Lag Compensators 1 + 4 ζ 4 − 2 ζ 2 � 1 / 2 �� • OL crossover freq.: ω c = ω n 2 − 4 ζ 2 + 4 ζ 4 + 1 − 2 ζ 2 � 1 / 2 �� • CL 3dB BW: ω B = ω n • 2% settling time: T s , 2 ≈ 4 ζω n • Rise time (0 % → 100 % ) of step response: π/ 2 +sin − 1 ( ζ ) √ ω n 1 − ζ 2 • Close relationship with ω c and ω B , esp. through ω n . Care needed in dealing with damping effects.
EE 3CL4, §9 13 / 56 Loopshaping, again Tim Davidson Frequency Domain Approach to Compensator Design 1 G ( s ) L ( s ) Lead E ( s ) = 1 + L ( s ) R ( s ) − 1 + L ( s ) T d ( s ) + 1 + L ( s ) N ( s ) Compensators Lag where, with H ( s ) = 1, L ( s ) = G c ( s ) G ( s ) Compensators What design insights are available in the frequency domain? Lead-Lag Compensators • Good tracking: = ⇒ L ( s ) large where R ( s ) large | L ( j ω ) | large in the important frequency bands of r ( t ) • Good dist. rejection: = ⇒ L ( s ) large where T d ( s ) large | L ( j ω ) | large in the important frequency bands of t d ( t ) • Good noise suppr.: = ⇒ L ( s ) small where N ( s ) large | L ( j ω ) | small in the important frequency bands of n ( t ) ⇒ L ( s ) small where ∆ G ( s ) • Robust stability: = G ( s ) large | L ( j ω ) | small in freq. bands where relative error in model large • Phase margin: ∠ L ( j ω ) away from − 180 ◦ when | L ( j ω ) | close to 1 Typically, L ( j ω ) is a low-pass function,
EE 3CL4, §9 14 / 56 How can we visualize these Tim Davidson things? Frequency Domain Approach to Compensator • Interesting properties of L ( s ) : encirclements, gain Design margin, phase margin, general stability margin, gain at Lead Compensators low frequencies, bandwidth ( ω c ), gain at high Lag frequencies, phase around the cross-over frequency Compensators Lead-Lag Compensators • All this information is available from the Nyquist diagram • Not always easily accessible • Once we have a general idea of the shape of the Nyquist diagram, is some of this information available in a more convenient form? at least for relatively simple systems?
EE 3CL4, §9 15 / 56 Bode diagram Tim Davidson Frequency Domain Approach to Compensator Design Lead Compensators Lag Compensators Lead-Lag Compensators Seems to capture most issues, but How fast can we transition from high open-loop gain to low open-loop gain? This is magnitude. What can we say about phase?
EE 3CL4, §9 16 / 56 Phase from magnitude? Tim Davidson • For systems with more poles than zeros and all the poles and zeros Frequency in the left half plane, we can write a formal relationship between Domain Approach to gain and phase. That relationship is a little complicated, but we can Compensator gain insight through a simplification. Design Lead • Assume that ω c is some distance from any of the corner Compensators frequencies of the open-loop transfer function. That means that Lag around ω c , the Bode magnitude diagram is nearly a straight line Compensators Lead-Lag • Let the slope of that line be − 20 n dB/decade Compensators • Then for these frequencies L ( j ω ) ≈ K ( j ω ) n • That means that for these frequencies ∠ L ( j ω ) ≈ − n 90 ◦ • That suggests that at the crossover frequency the Bode magnitude plot should have a slope around − 20dB/decade in order to have a good phase margin • For more complicated systems we need more sophisticated results, but the insight of shallow slope of the magnitude diagram around the crossover frequency applies for large classes of practical systems
Recommend
![h ( n ) H ( z ) x ( n ) H [ x ( n )] y ( n ) x ( n ) y ( n ) x ( n ) y ( n ) System : any](https://c.sambuz.com/682675/h-n-h-z-s.webp)


More recommend
Explore More Topics
Stay informed with curated content and fresh updates.