Discrete Time Systems: Impulse responses and convolution; An - PowerPoint PPT Presentation
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Discrete Time Systems: Impulse responses and convolution; An introduction to the Z-transform Lecture 5 Systems and Control Theory STADIUS - Center for Dynamical
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Discrete Time Systems: Impulse responses and convolution; An introduction to the Z-transform Lecture 5 Systems and Control Theory
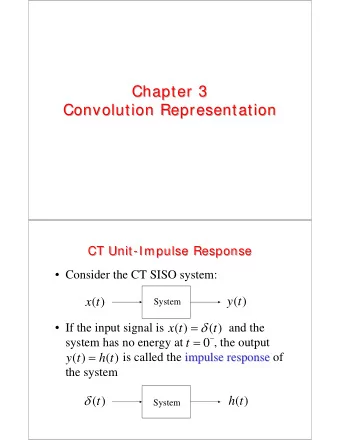
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Impulse response and system output Using impulse response, output can be calculated as: y[k] = h[k] * u[k] Proof: Definition of impulse response Time-invariance Linearity Definition of convolution Conclusion The impulse of a system describes the input/output behavior completely. 2 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Impulse response and system output Visually: 3 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Z-transform Discrete equivalent to the Laplace-transform Converts time dependent descriptions of systems to the time- independent Z-domain. Simplifies many calculations Convolution theorem → convolution becomes multiplication Linear difference equations become simple algebraic expressions ... 4 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Z-transform 2 forms Bilateral: Requires knowledge of h for all values of k, including negative values Can be used for non-causal systems Unilateral: Only requires knowledge of h for positive values of k Can only be used for causal systems without loss of information 5 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Z-transform: properties 6 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Transfer function (DT) The transfer function of a discrete system is the Z-transform of the impulse response. H(z) = Z {h[k]} Recall: y[k] = h[k] * u[k] Let U(z) = Z {u[k]} Y(z) = Z {y[k]} Thus, applying the convolution theorem: Y(z) = H(z) . U(z) BUT: Only applies when system starts from a null state (Reason: impulse response itself starts from a null state) 7 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Getting rid of convolutions (DT) 8 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics List of common Z-transform pairs 9 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics List of common Z-transform pairs 10 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Region of convergence For the Z-transform to converge the following must hold: We will look at convergence separately for positive and negative k, splitting the convergence criterion in 2: j ϴ Using z = r e with R+ as small as possible and R- as large as possible we get: 11 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Region of convergence The sums are finite if and Region of convergence: R + < R - : Ring R - < R + : No ROC Causal system, for negative k: cannot contain any poles of the system ROC of a stable system always contains the unit circle R - R + Source: http://www.expertsmind.com/learning/z-transform-and-realization-of-digital-filters-assignment-help-7342873888.aspx 12 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Region of convergence 2 3 System 1: Causal: h[k] = { …, 0, 0, 0, 1, 1/3, (1/3) , (1/3) , … } 3 2 System 2: Anti- causal: h[k] = { …, 3 , 3 , 3, 1, 0, 0, 0, … } k Analytical representation: h[k] = (1/3) After Z-transform: H(z) = z / (z – 1/3) 2 systems with very different behaviors, but the same transfer function? Answer: different ROC: System 1: |z| > 1/3 System 2: |z| < 1/3 13 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Inverse Z-transform Split the transfer function up in partial fractions This is done by first factorizing the denominator If all poles have multiplicity 1 then the following can be used: The coefficients can be calculated by: 14 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Inverse Z-transform If there are poles with multiplicity higher than 1 then the following approach is needed: Where the highest coefficient for each pole can be calculated by: 15 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Inverse Z-transform Any remaining coefficients can be found by evaluating the equation: for a number of values of z. 16 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Inverse Z-transform Because of the linearity of the inverse Z-transform, each partial fraction can be transformed individually and the results can be added together afterwards. The individual inverse Z-transforms can be found with the following: 17 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Example Transfer function: Partial fraction decomposition: Using the given formula’s: This gives: By evaluating the transfer function for z=1 we get: 18 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Example The resulting transfer function is: We can now find the inverse Z-transform for each individual fraction: 19 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Inverse Z-transform Another technique for calculating the inverse Z-transform is direct division The numerator of the transfer function is divided by the denominator via long division. Example: -1 ⇒ Z {F(z)} = 1, 3, 12, 25, ... 20 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Solving difference equations with the Z-transform A system is described by a difference equation of the following form: After the Z-transform: Rearranged: 21 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Solving difference equations with the Z-transform l We’ll apply the following transformation of the double summations: 22 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Solving difference equations with the Z-transform The final simplified result is: With this result it is easy to find the resulting output from a given input or vice-versa given a difference equation. Right-hand fraction = output resulting from starting conditions: will vanish with time = transient behavior Left-hand fraction = output resulting from input: will remain = steady state response is the “transfer function” of the system 23 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Steady state behavior via Z-transform Starting from the previous result: We wish to find the resulting output from the input: To simplify derivation, we use: j(k α + θ ) u[k] = e With Z-transform: 24 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Steady state behavior via Z-transform Filling in U(z) and splitting into partial fractions: Calculating the coefficient c: After the inverse Z-transform: 25 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Steady state behavior via Z-transform Because of linearity we can ignore the imaginary component, leading to the result: In most applications (= stable system) we can ignore transient behavior as it will quickly die out Using the transfer function steady state behavior can easily be determined by converting sinusoidal signals to phasors cos(k α + θ ) The input: |H(ej α )| cos(k α + θ + ∠ H(ej α )) Will produce steady state: 26 Systems and Control Theory
STADIUS - Center for Dynamical Systems, Signal Processing and Data Analytics Example We’ll have a look at the steady state response to the input for the system: Evaluating the transfer function for the exponential with pulsation 3 gives: The resulting output has been reduced to a third in amplitude and has undergone a small phase shift. 27 Systems and Control Theory
Recommend



![h ( t ) y ( t ) x [ n ] h [ n ] y [ n ] Review of sampling property Discrete-time](https://c.sambuz.com/1060291/h-t-s.webp)
More recommend
Explore More Topics
Stay informed with curated content and fresh updates.