
Discrete-time Systems in the Time Domain Chaiwoot Boonyasiriwat - PowerPoint PPT Presentation
Discrete-time Systems in the Time Domain Chaiwoot Boonyasiriwat August 21, 2020 Discrete-time Systems A discrete-time system is an entity that processes a discrete-time input signal to produce a discrete- time output signal
Discrete-time Systems in the Time Domain Chaiwoot Boonyasiriwat August 21, 2020
Discrete-time Systems ▪ “A discrete-time system is an entity that processes a discrete-time input signal to produce a discrete- time output signal .” ▪ Digital signals are in both amplitude and time. ▪ A system associated with digital signals is a digital filter . ▪ “A finite -dimensional linear time-invariant (LTI) discrete-time system can be represented in the time domain by a constant- coefficient difference equation” ▪ “Many problems can be modeled as discrete -time systems using difference equations.” 2 Schilling and Harris (2012, p.70-71)
Example: Radar ▪ “A radar antenna transmits an EM wave into space. When a target is illuminated by the radar, some of signal energy is reflected back and returns to the radar receiver.” ▪ “The received signal can be modeled using the difference equation” ▪ “The first term represents the echo of the transmitted signal with delay d proportional to the time of flight.” ▪ “The second term accounts for random noise picked up and amplified by the receiver.” ▪ “Typically, the echo is very faint, i.e., .” 3 Schilling and Harris (2012, p.70-71)
Example: Radar “The objective in processing the received signal is to determine whether or not an echo is present.” “If an echo is detected, then the distance to the target can be obtained from the delay d .” Noise-corrupted received signal 4 Schilling and Harris (2012, p.72-73)
Example: Radar ▪ “If T is the sampling interval, then the time of flight in seconds is .” ▪ The distance to the target is where c is the speed of light and the factor 2 arises because the time of flight is a two-way travel time. ▪ “To detect if an echo is present in the received signal, we compute the normalized cross-correlation which measures the degree to which the received signal is similar to the transmitted signal .” 5 Schilling and Harris (2012, p.72-73)
Example: Radar 6
Classification of Discrete-time Signals ▪ Finite signal : signal is nonzero for a finite number of samples where . Otherwise, it is called infinite signal . ▪ Causal signal : . Otherwise, it is called noncausal signal . ▪ Periodic signal : where N is the period. ▪ Bounded signal : . Otherwise, it is an unbounded signal . 7 Schilling and Harris (2012, p.74-75)
Norm of Signals ▪ Signals can be thought of as vectors. ▪ The length of vectors can be measured by • norm • norm ▪ Absolutely summable signal : ▪ Square summable signal : 8 Schilling and Harris (2012, p.76-77)
Energy and Power Signals ▪ Energy of signal is defined as ▪ Since , the energy is finite if is square summable. ▪ Energy signal : a signal with finite energy ▪ Instantaneous power : ▪ Average power : ▪ Power signal : a finite signal with nonzero average power 9 Schilling and Harris (2012, p.77-78)
Common Signals ▪ Unit impulse: ▪ Unite step : ▪ Causal exponential : ▪ Periodic signal : 10 Schilling and Harris (2012, p.79-80)
Discrete-time Systems ▪ Linear system : S is a linear system if Otherwise, the system S is nonlinear. ▪ Time-invariant system : S is a time-invariant system if the output produced by the shifted input is . Otherwise, the system S is time-varying. ▪ Causal system : “For a physical system operating in real time , the output at the present time k cannot depend on the future input , because the input has not yet occurred.” ▪ “A discrete -time system is causal if for each time k ” 11 Schilling and Harris (2012, p.82-83)
Discrete-time Systems ▪ “When signal processing is not performed in real time, noncausal systems can be used to process the data offline in batch mode, where future samples of the input are available.” ▪ Stable system : S is a bounded-input bounded-output (BIBO) stable if every bounded input produces a bounded output : ▪ Passive system : energy does not increase: ▪ Lossless system : energy stays the same: ▪ “Lossless physical systems contain energy storage elements (spring, mass, capacitor, inductor) without energy dissipative elements (resistor, damper) 12 Schilling and Harris (2012, p.85-86)
Difference Equations ▪ “The output of a causal LTI system S at time k can be expressed as” ▪ “When causal inputs are used, the output or response of a discrete-time system depends on both the input and the initial condition represented by a vector of past outputs,” ▪ “For a linear system, the contributions to the output from initial condition y 0 and input x ( k ) can be considered separately.” 13 Schilling and Harris (2012, p.86)
Zero-input Response ▪ Zero-input response of a discrete-time system S is the solution of the system when the input is x ( k ) = 0 and is denoted as y zi ( k ). ▪ To solve the system for a zero- input response, let’s use the trial solution of the form where z is a complex scalar to be determined. ▪ Substituting the trial solution into the system and multiplying both sides by z N-k yields the characteristic polynomial , 14 Schilling and Harris (2012, p.87)
Zero-input Response: Simple Mode ▪ The factored form of the characteristic polynomial is where p i are the roots. So, z must be equal to the roots. ▪ If the characteristic polynomial has N distinct roots, also called simple roots, the general solution is the linear combination where are called the simple natural modes of the system. ▪ Applying the initial conditions yields a linear system for determining the value of the coefficients c i . 15 Schilling and Harris (2012, p.87)
Example Consider the 2D discrete-time system with initial condition y (-1) = 3 and y (-2) = 2. The characteristic polynomial of the system is and has simple roots The zero-input response is then of the form Applying the initial conditions yields the linear system 16 Schilling and Harris (2012, p.88)
Zero-input Response: Multiple Mode When root p occurs r times, p is referred to as a root of multiplicity r , and generates a multiple natural mode of the form Example: System with initial condition y (-1) = -1 and y (-2) = 6 has the corresponding characteristic polynomial as whose root is of multiplicity 2. The zero-input response is then of the form Applying the initial conditions yields the linear system 17
Zero-input Response: Complex Mode When roots are complex, they always occur in conjugate pairs since the coefficients of a ( z ) are real. Complex conjugate roots form the complex mode of the form Hint: use Euler identity Example: System with initial condition y (-1) = 4 and y (-2) = 2 has the corresponding characteristic polynomial as The zero-input response is then of the form Applying the initial conditions yields 18 Schilling and Harris (2012, p.90)
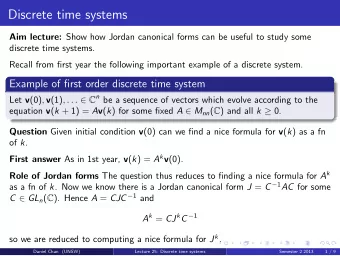
Zero-state Response Zero-state response of a LTI discrete-time system is the output corresponding to an arbitrary input x ( k ) when the initial condition vector is zero, i.e., Consider a special case of causal exponential input of the form where A is amplitude and p 0 exponential factor. If then the input polynomial associated with the coefficients of the input is 19 Schilling and Harris (2012, p.90)
Zero-state Response Suppose that the input is a causal exponential and that the characteristic polynomial a ( z ) has N +1 distinct roots. The zero-state response has a form similar to the zero-input response: “The weighting coefficient can be computed from the polynomials a ( z ) and b ( z ) as where p i are the roots of the denominator.” 20 Schilling and Harris (2012, p.90-91)
Example Consider the system with the input “The characteristic polynomial of this system is” “The input polynomial of this system is” We then have 21 Schilling and Harris (2012, p.91)
Example (continued) The weighting coefficients are The zero-state response is then The complete response is 22 Schilling and Harris (2012, p.91)
Example (continued) Suppose the initial condition is that is The zero-input response is So, the complete response of the system is “Note that for n >> 1, the complete response is dominated by the zero-state response because the zero- input response quickly dies out.” 23 Schilling and Harris (2012, p.92)
Block Diagram ▪ “Discrete -time systems can be displayed graphically in the form of block diagrams.” ▪ “A block diagram is a set of blocks that represent processing units interconnected by directed line segments that represent signals.” 24 Schilling and Harris (2012, p.94-95)
Block Diagram: Example 1 Consider a moving average filter whose output is a weighted sum of the past inputs: When M = 3, the block diagram of moving average filter is 25 Schilling and Harris (2012, p.95)
Block Diagram: Example 2 A LTI system can be rewritten as by zero padding the coefficient vectors a and b so that where is the system dimension. When D = 2, using intermediate signals, the output can be defined recursively by 26 Schilling and Harris (2012, p.96)
Recommend












More recommend
Explore More Topics
Stay informed with curated content and fresh updates.